АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД
Курс лекций для студентов специальности
"Металлообрабатывающие станки и инструменты"
ГЛАВА 1 ОБЩИЕ ВОПРОСЫ АЭП. МЕХАНИКА АЭП
1.1. Основные понятия и определения
1.1. Механические характеристики рабочих машин и ЭД
1.2. Механические характеристики ДПТ
1.3. Механические характеристики АД
1.4. Механические характеристики СД
ГЛАВА 2 МЕТОДЫ РАСЧЕТА МОЩНОСТИ И ВЫБОРА ЭЛЕКТРОДВИГАТЕЛЕЙ
2.1. Силы и моменты, действующие в ЭП
2.2. Приведение моментов сопротивления и инерции к валу двигателя
2.3. Общие замечания. Нагрев и охлаждение двигателей
2.4. Метод средних потерь. Эквивалентные методы.
2.5. Серии электродвигателей, применяемых в станках
ГЛАВА 3 ЭЛЕМЕНТЫ СИЛОВОЙ И РЕГУЛИРУЮЩЕЙ ЧАСТЕЙ СЭП
3.1. Тиристорные преобразователи
3.2. Транзисторные преобразователи
3.3. Типовые датчики
3.4. Типовые узлы защиты ЭП
3.5. Типовые регуляторы
ГЛАВА 4 ТИПОВЫЕ СЭП МЕТАЛЛОРЕЖУЩИХ СТАНКОВ
4.1. Принципы построения типовых СЭП
4.2. Одноконтурная СЭП постоянного тока
4.3. СПР ЭП постоянного тока с однозонным управлением
4.4. СПР ЭП постоянного тока с двухзонным управлением
4.5. СЭП переменного тока с АИН и АИТ (схемы с ОС по скорости и току)
4.6. Системы стабилизации технологических параметров при резании металлов
ГЛАВА 5 СЛЕДЯЩИЕ СЭП МЕТАЛЛОРЕЖУЩИХ СТАНКОВ
5.1. Типовые структуры следящих ЭП и их элементы
5.2. Следящий ЭП с подчиненным регулированием параметров
5.3. Следящий ЭП подачи копировально-фрезерных станков
ЛИТЕРАТУРА
1. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: Учебник для вузов / М.П. Белов, В.А. Новиков, Л.Н. Рассудов. – М.: Издательский центр "Академия", 2004. – 576 с.
2. Инжиниринг электроприводов и систем автоматизации: учеб. пособие для студ. высш. учеб. заведений / М.П. Белов, О.И. Зементов, А.Е. Козярук и др.; под. ред. В.А. Новикова, Л.М. Чернигова. – М.: Издательский центр "Академия", 2006. – 368 с.
3. Ковчин С.А., Сабинин Ю.А. Теория электропривода: Учебник для вузов. – СПб.: Энергоатомиздат, 2000. – 496 с.
4. Шестаков В.М., Дмитриев Б.Ф., Репкин В.И. Электронные устройства систем автоматического управления: Учебное пособие. – СПб: Изд. ЛГТУ, 1991.
ГЛАВА 1. ОБЩИЕ ВОПРОСЫ АЭП. МЕХАНИКА АЭП.
1.1. Основные понятия и определения
Существуют различные виды приводов, но благодаря эффективному аккумулированию, простоте передачи, свойствам суммирования и делимости электроэнергия более широко используется по сравнению с другими видами энергии. В настоящее время наиболее часто используется автоматизированный электропривод (ГОСТ Р 50369-92).
Электрическим приводом (ЭП) называется электромеханическая система, предназначенная для приведения в движение рабочих органов машин, целенаправленного управления этими процессами и состоящая из передаточного, электродвигательного, преобразовательного, управляющего и информационного устройств.
Передаточное устройство предназначено для преобразования форм движения и передачи механической энергии от двигательного устройства к рабочим органам машины.
Двигательное устройство преобразует электрическую энергию в механическую и формирует совместно с передаточным устройством заданные формы движения рабочих органов.
Преобразовательное устройство служит для связи СЭП с источником электроэнергии (промышленная сеть или автономный), для преобразования одной формы электроэнергии в другую (например, выпрямление переменного тока).
Управляющее
и информационное устройства
предназначены для формирования заданных законов управления потоком энергии ![]() и движения рабочих органов машин.
и движения рабочих органов машин.
Классификация ЭП
1. По назначению: а) главные (например, главного движения); б) вспомогательные (например, подачи).
2. По роду потребляемого тока двигателя: а) постоянного тока; б) переменного тока.
3. По виду силовых ключей: а) тиристорные; б) транзисторные;
в) микропроцессорные
4. По виду системы автоматического управления (САУ): а) аналоговые (непрерывные) системы ЭП (СЭП); б) цифровые (дискретные) СЭП; в) цифроаналоговые СЭП;
г) линейные или нелинейные СЭП;
д) статические или астатические СЭП;
5. По выполняемым функциям:
а) грубое регулирование скорости (разомкнутые СЭП);
б) точное регулирование скорости (замкнутые СЭП);
в) слежение за произвольно изменяющимися входными сигналами (следящие системы);
г) программная отработка заданий (СЭП с программным управлением);
д) взаимосвязанное регулирование параметров (многодвигательные и взаимосвязанные СЭП);
Функции а)-д) считаются основными. К дополнительным функциям относятся: сигнализация (диагностика) и защита ЭП.
1.2. Механические характеристики рабочих машин и электродвигателей
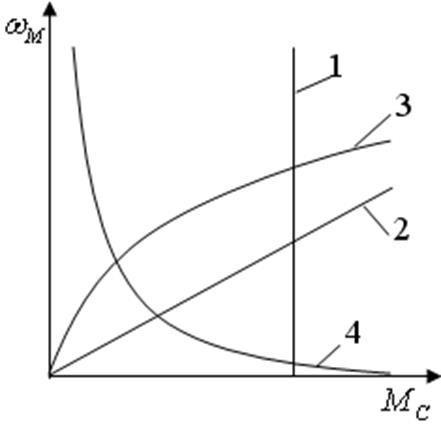
1. Механические
характеристики рабочих машин (зависимость угловой скорости механизма от момента
сопротивления на его валу) ![]() :
:
1 – не зависящая от скорости;
2 – линейно зависящая;
3 – нелинейно зависящая (вентиляторная);
4 – намоточно-размоточная.
2. Механические характеристики ЭД (зависимость угловой скорости
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.