where
estimation vector![]() is
produced by observer (7),(8), vector
is
produced by observer (7),(8), vector ![]() is constant coefficients vector, and function
is constant coefficients vector, and function ![]() is exponentially fading.
is exponentially fading.
Theorem proving
Let nullity vector is defined as
![]() . (11)
. (11)
Subject to (1, 7-11), differentiated nullity vector looks like:
![]() (12)
(12)
Since
matrix G is defined as hurwitz, vector ![]() at
at ![]() .
.
3.2 Synthesis of control law.
We have a purpose to stabilize the plant by compensation of external disturbance.
To make this, let’s choose the control law in a following way:
![]() , (13)
, (13)
where vector ![]() is
adjustable parameters vector, which adjusting algorithm will be defined
further, vector
is
adjustable parameters vector, which adjusting algorithm will be defined
further, vector ![]() is produced by
observer (7),(8). Coefficient
is produced by
observer (7),(8). Coefficient ![]() and matrix
and matrix ![]() will
be defined further. Vector k is choosing in such way, that matrix
will
be defined further. Vector k is choosing in such way, that matrix ![]() will be stable.
will be stable.
Now we must define adjusting algorithm ![]() , conditions for choosing
coefficient
, conditions for choosing
coefficient![]() and matrix
and matrix![]() for synthesis necessary
control signal, which will provide fulfillment of condition
for synthesis necessary
control signal, which will provide fulfillment of condition ![]() .
.
The functional Lyapunov-Krasovsky for these conditions can be presented in such form:
 , (14)
, (14)
where ![]() - is some symmetrical
positive defined matrix (it will be defined further),
- is some symmetrical
positive defined matrix (it will be defined further), ![]() is some positive
coefficient.
is some positive
coefficient.
Derivative
from this functional along trajectory of the plant (1), taking into account
(10) and (14), (vector ![]() is
neglected as tending to zero) looks like:
is
neglected as tending to zero) looks like:
 (15)
(15)
For system (1),(2) asymptotic stability, the fulfillment of following condition is necessary:
![]() , (16)
, (16)
where Q is some symmetrical positive defined matrix.
To simplify a functional derivative expression, let’s use known estimation.
![]() , (17)
, (17)
Since
matrix D can be parameterized as ![]() , expression (17) can be transformed:
, expression (17) can be transformed:
 (18)
(18)
where ![]() - constant coefficient.
- constant coefficient.
We can find a following expression for functional derivative putting into derivative expression (15) obtained estimation (17),(18), and control signal u (13):
![]() , (19)
, (19)
where I is identity matrix suitable dimension.
Let’s choose adjusting algorithm in following way:
![]() . (20)
. (20)
So we can find out such expression:
![]() .
(21)
.
(21)
To comply the target conditions, we have to complete this inequation:
![]() (22)
(22)
A condition
![]() has to be fulfilled, at
the same time matrix P must be found from Lyapunov equation:
has to be fulfilled, at
the same time matrix P must be found from Lyapunov equation:
![]() . (23)
. (23)
Thus, we’ve got all conditions for all needed parameters of control law, which are necessary for plant stabilization.
4. System example
An example of control system simulation with all mentioned hypotheses is given below
A plant
is given by an equation ![]()
 ,
,  ,
,  ,
, ![]()
Disturbance will be defined as sustained vibrations,![]() .
.
It represents primitive integral of differential equation  with initial conditions
with initial conditions ![]() ,
, ![]() , i.e. it can be
considered as output of linear generator:
, i.e. it can be
considered as output of linear generator:
![]() ,
, ![]() ,
, ![]() .
.
Pair (G,l) must be fully controlled and matrix G must be hurwitz. So, (G,l) can be presented as
 ,
, ![]() .
.
Matrix N has to satisfy the condition (9), therefore (b=l)
we will choose is as  .
.
Value of coefficient![]() has no matter for external disturbance compensation, but it exerts a
great influence on the transient performance. As we have not to achieve defined
quality index in this example, we can put any value of this coefficient. Let
has no matter for external disturbance compensation, but it exerts a
great influence on the transient performance. As we have not to achieve defined
quality index in this example, we can put any value of this coefficient. Let![]() .
.
For this matrix D, coefficient ![]() 1.26. Value of coefficient
1.26. Value of coefficient ![]() has to satisfy condition (25), it is important to mark, that it
also has influence on transient performance.
has to satisfy condition (25), it is important to mark, that it
also has influence on transient performance.
For this example, let ![]() and
and ![]() .
.
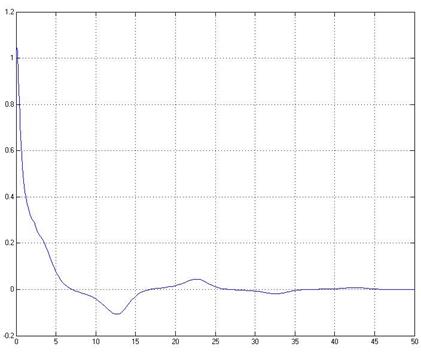
The results of such system modeling in simulink environment with initial data mentioned previously are given below. Transient performance for first component of vector x looks like:
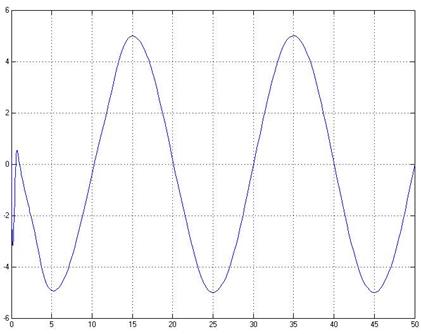
After a time, the control signal u(t) begins to reproduce disturbance f , but with opposite sign. Vector x tends to zero. It looks like:
5. Conclusion
Thus,
we have formed an adaptive control system allowing to stabilize a plant with
delay under external disturbance. At that, we have measured only state vector.
We’ve used inner model method [1], extended for plants with time-delay. At the
same time, all indeterminacy of disturbance ![]() is taking to indeterminacy of vector
is taking to indeterminacy of vector ![]() . It’s noteworthy that control algorithm doesn’t depend on time of
delay
. It’s noteworthy that control algorithm doesn’t depend on time of
delay ![]() .
.
References
[1]. Nikiforov V.O. «External determinant disturbance observers» Automatics and Telemechanics, 2004 #10 p.
13-24. (in Russian)
[2]. Miroshnik I.V., Nikiforov V.O., Fradkov A.L. “Nonlinear and adaptive control of complex dynamical systems”, St. Petersburg: Nauka, 2000 (in Russian)
[3]. Kolmanovsky V.B., Nosov V.R. “Stability and periodical states of conrol systems with delay”, St. Petersburg: Nauka, 1981 (in Russian)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.