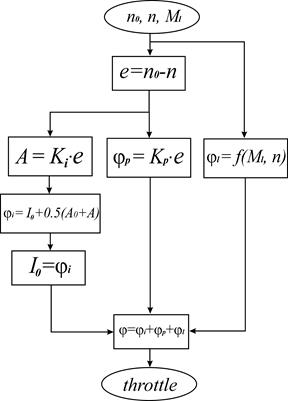
Needed angle of the throttle valve during the process of regulating was calculating according to the algorithm shown on fig. 4. The actual position of the throttle valve was made of thee components: φi, φP,and φl. The parts φi and φP realize integral and proportional controlling on engine frequency shaft deviation. Coefficients in integral (Ki) and proportional (KP) parts are calculated in terms of methods of Ziegler and realize aperiodical process of controlling.
As the present methods are close to the meanings of the coefficients it is necessary to be sure in it experimentally. After that the meaning of integral coefficient will be equal to 0,045, and proportional one 0, 45.
When using the engine in idling (when coefficient of the regulating object increasing is maximum) the data of tuning provide the system performance on a line of oscillation steady within 1% of regulated quantity.
The part φl realizes the control of load and is the functional dependence of the throttle opening angle from the main rotating frequency and load, obtained as a result of the engine load characteristic processing.
|
|
|
Fig. 4. Algorithm of the performance of two impulse controller of the rotating frequency. |
To measure the engine load direct and indirect methods are used. In direct method of measuring the torsion shaft with sensors for determining the angle of it twisting is used. The main lack of this method is necessity of the installation addition devices and sensors increasing the system cost.
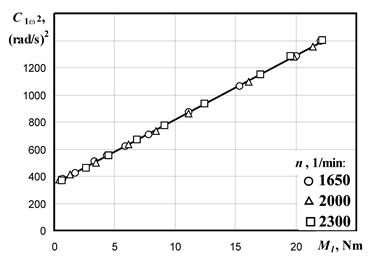
In present work new method of indirect determining of the load moment was used which was proposed at the department of ICE of VlSU. The main idea of it is that the criterion of loading was accepted the amplitude of the first harmonic of the square of the instant angle speed of the crankshaft. Experimentally the dependence of the load meaning from the quantity given amplitude (fig.5) was set. So, the dependence is of the linear character and practically does not depend on shaft rotating frequency of the engine.
|
|
|
Fig.5. Dependence of the load from the amplitude of the first harmonic of the square of the instant angle speed of the crankshaft. |
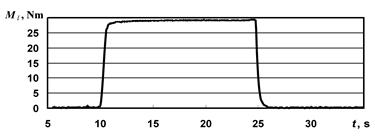
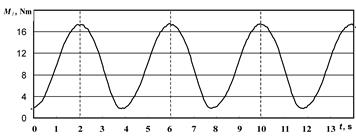
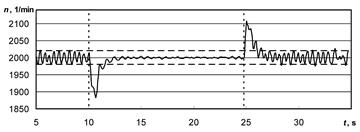
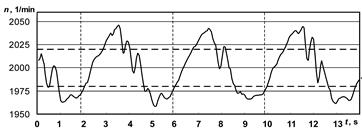
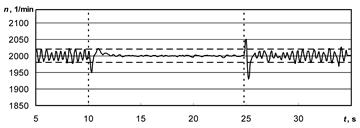
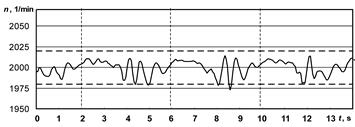
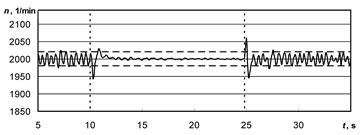
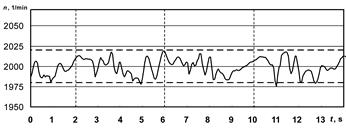
Main generator installations operate in restating frequencies of 3000 1/min or 15000 1/min. To provide experimental research the intermediate meaning of the shaft rotating frequency of the engine which must be supported by automatic regulator equal to 2000 1/min. is chosen. As the load laws the stepping and harmonic changing of the load were used. When stepping changing the load increased in a quantity equal to 75% from the maximum torque of the engine with the following drop up to 0. The amplitude of harmonic was equal to 50% of maximum torque of the engine, and period 4s. The tests were provided with the controller realizing the following laws: PI, two-impulse according to speed and load determined by direct changing and two-impulse according to speed and the load determined by indirect changing. Direct changing of the load was produced by the tension sensor, fitted on inductive brakes arm. In this location the mechanical connection the sensor with ICE was included, and the presence of magnet connection allows avoiding shock loads. Fig.6 shows the results of the automatic control system tests using the control laws mentioned above. Analyses of transition processes show that two-impulse control let decrease dynamic error of regulating and shorten the time of transition processes.
The results of experiments demonstrate usefulness of indirect method of the load determining of the engine for using it in control loops. It was first time when such high quality indexes of transition processes of the automatic control system of one-cylinder engine were produced. The main advantage of given method is the absence of additional devices and sensors increasing the system cost. The further improvement of the automatic control system using this criterion is connected, most of all, with the increasing of load measuring accuracy, as well by the introducing additional connections into control loops, taking in account the speed of load changing and other parameters.
|
Law of loading |
|
|
|
|
|
Proportional-integral |
|
|
|
|
|
Two-impulse according to speed and load (by direct measuring) |
|
|
|
|
|
Two-impulse according to speed and load (by indirect measuring) |
|
|
|
|
|
Fig. 6. Transition processes of the automatic control system in different control laws. |
|
References
[1] A.M. Lituga, N.V. Klinachev, V.M. Mazyrov, Theoretical bases of construction of effective ACS of TP, Offline the version 1.1. - Tula, Chelyabinsk, 2002. - 703 files (In Russian).
[2] A. Leonenkov, Fuzzy modeling in environment Matlab and fuzzyTECH, St.-Petersburg: BHV-Petersburg, 2003 (In Russian).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.