four-quadrant asynchronous electric drives
WITH THREE - PHASE PWM RECTIFIERS
Alexey S. Isakov
Department of Control Systems and Informatics
Saint-Petersburg State University of Information Technologies, Mechanics and Optics
Kronverksky av. 49, Saint-Petersburg, 197101, RUSSIA
Tel: +7(812)5954128, E-mail: isakovas@nm.ru
Abstract — This article presents results of research and development of four-quadrant asynchronous electric drives with the vector control systems and IGBT inverters with a sinusoidal pulse-width modulation for subway escalators.
1. INTRODUCTION. A STATEMENT OF PROBLEM
Difficulties with support of start-stop working diagrams of asynchronous machines of subway escalators, underused of induction machines, necessity to regulate velocity of escalators, a continuous work in generator mode at descent of passengers are well-known. These problems can be solved bay use of four-quadrant asynchronous electric drives with the vector control systems and two IGBT PWM inverters. One of which works as the IGBT PWM rectifier, and another is used in the induction drive.
2. STRUCTURE AND PRINCIPLES OF OPERATION OF FOUR-QUADRANT ASYNCHRONOUS ELECTRIC DRIVES
Now, one of the important problem is making four-quadrant AC drives with the vector control systems and IGBT PWM inverters. That construction of power system allows a drive to work long time in a generating mode returning in a power network a sine wave current. In a motor operating mode the drive consumes a sinusoidal current from power network. It essentially reduces negative influence of inverters on an industrial network, in comparison with similar thyristor inverters. Now, therefore, expensive systems with IGBT modules are frequently used. It is determined by increased requirements to quality of returned and consumed electric energy [1].
The modern induction drive is made on the basis of vector control systems in the reference frame rotating with frequency of an electromagnetic field. That method of control works with IGBT PWM rectifier systems. Really, in the reference frame rotating with frequency of power network, where one of axes orientation with respect to the line voltage vector it is possible to divide of control processes for active and reactive component of power. In this case there is a possibility not only to provide the required voltage in the DC link, but also to compensate the reactive power in AC network by control of two current components [2].
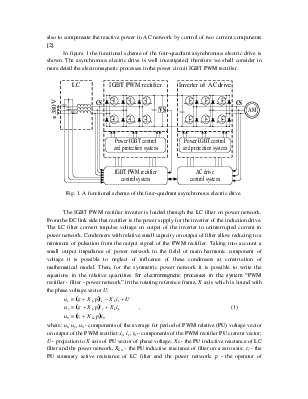
In figure 1 the functional scheme of the four-quadrant asynchronous electric drive is shown. The asynchronous electric drive is well investigated, therefore we shall consider in more detail the electromagnetic processes in the power circuit IGBT PWM rectifier.
Fig. 1. A functional scheme of the four-quadrant asynchronous electric drive.
The IGBT PWM rectifier inverter is loaded through the LC filter on power network. From the DC link side that rectifier is the power supply for the inverter of the induction drive. The LC filter convert impulse voltage on output of the inverter to uninterrupted current in power network. Condensers with relative small capacity on output of filter allow reducing to a minimum of pulsation from the output signal of the PWM rectifier. Taking into account a small output impedance of power network in the field of main harmonic component of voltage it is possible to neglect of influence of these condensers at construction of mathematical model. Then, for the symmetric power network it is possible to write the equations in the relative quantities for electromagnetic processes in the system “PWM rectifier - filter - power network” in the rotating reference frame, X axis which is bound with the phase voltage vector U:
 , (1)
, (1)
where: ux, uy, u0 - components of the average for period of PWM relative (PU) voltage vector on output of the PWM rectifier; ix, iy, i0 – components of the PWM rectifier PU current vector; U - projection to X axis of PU vector of phase voltage; XL - the PU inductive reactance of LC filter and the power network, XLo – the PU inductive reactance of filter on a zero axis; r1 - the PU summary active resistance of LC filter and the power network; p - the operator of differentiation on the PU time. As base quantities are accepted the induction machine base quantities [3].
The simultaneous equations (1) are correct for a case when period of PWM is significantly less than time constant XL/r1 [3].
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.