There is obtained acceptable maximum
deviation of the air fuel ratio within ![]() 3% on training, testing and validation data set after realization
seven engine calls.
3% on training, testing and validation data set after realization
seven engine calls.
This part of researches is implemented in specially done application “Dynamic FUEL CORRECTOR” under mathematical package “MATLAB”, applications “SIMULINK” and “Neural Network TOOLBOX”.
Engine represents the fuel film model based on conservation law of fuel mass into inlet pipe. Inputs of model is air cycle filling (GBC), engine frequency (FREQ), static cycle fuel delivery (GTCSTAT). The model has 6 parameters: three of coefficients is regimes distributed parameters (look-up tables), another 3 coefficient is constants. The parameters identification procedure is realized on real engine VAZ-21114.
Structure of neural fuel film observer is similar to the DFC one: feed-forward, two layers (hiding layer – 15 neurons, output layer – one neuron), training function is based on Levenberg-Marquardt optimization. Learning iteration quantity of neural networks between engine call is variable but within 50 value.
Regimes factors is throttle position, air cycle filling, engine frequency. All regimes factors is a model-based signals. Throttle position (THR) is emulated arbitrary style drive from THRmin= 0 % to THRmax=100 %. Air cycle filling is presented as filter of low frequency with coefficient 0,2 (function from throttle position). Engine frequency is presented as filter of low frequency with coefficient 0,05 (function from air cycle filling).
All data set is divided into three part: training, testing and validation set. Training data set involves 40 transient processes, testing data set involves 8 transient processes and validation data set involves 8 transient processes.
The DFC with neural coefficients realized in real electronic control unit (ECU), in principle, consist of two parts. The first part represents standard DFC based fuel film observer. The second part represents neural network (NN) that is determined the values of fuel film observer coefficients. The optimization procedure is based on MATLAB TOOLBOX "Genetic Algorithms". It works interactively with program that is realized control of the operation engine regime. The structure of calibration method is shown on Figure 3.
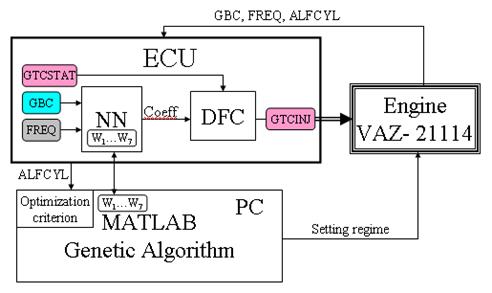
Figure 3. It is automated experimental calibration method diagram of the standard DFC with neural coefficients.
Calibration procedure.
The parameters of engine VAZ-21114 is: 4 cylinders, iVh=1.6 litre, 8 valves.
The particular qualities of the electronic control system from standard bundling is presence of the electronic control throttle (Bosch) and liner L-sensor (Bosch).
Operation engine conditions: Coolant temperature is 80 oC. Oil temperature is 82 oC. Total quantity of dynamic regimes – 4 (two opening, two closing of throttle).
DFC structure: Observer has two variable coefficients.
NN structure: feed-forward; 7 adjustable parameters (W1…W7); inputs – air cycle filling (GBC), engine frequency (FREQ), outputs – values of the fuel film observer coefficients (Coeff).
On-line optimization procedure parameters: Total quantity of engine call – 200. Total quantity of spending time ~ 100 minutes.
The passing of the engine parameters before and after optimization procedure is shown on Figure 4.
There is obtained significant excess air factor decrease in all four dynamic operation engine regimes in comparison with control scheme without DFC.
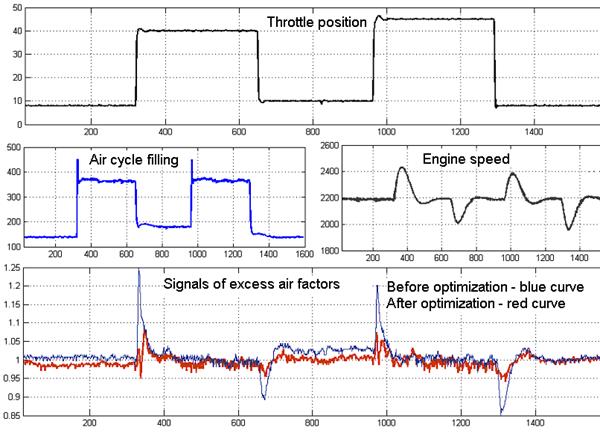
Figure 4. It is passing engine parameters before and after optimization procedure realization against of engine cycle quantity.
1. The theoretical and experimental researches shows fundamental application possibility neural network in standard electronic control unit.
2. The significant excess air factor decrease by means of applying DFC with neural coefficients shows fundamental possibility of realization this control scheme. But for much more quantity of dynamic regimes requires a lot of neural network parameters and this could be cause a big problem for global optimization procedure. Second problem is difficult to apply backpropagation error formulation rule.
3.
The compensation of air fuel ratio at level
within the limits ![]() 3% on vary dynamic regimes by
means of neural DFC with neural observer shows effectively work of this
control scheme. And in the future, this one could be apply in real ECU.
3% on vary dynamic regimes by
means of neural DFC with neural observer shows effectively work of this
control scheme. And in the future, this one could be apply in real ECU.
1. Aquino C.F., "Transient A/F Control Characteristics of the 5 Liter Central Fuel Injection Engine", SAE Techniclal Paper 810494, 1981.
2. Stergiou C., Siganos D., "Neural networks", Web site -(http://www.doc.ic.ac.uk/~nd/surprise_96/journal/vol4/cs11/report.html )
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.