Санкт-Петербургский Государственный Университет Информационных Технологий, Механики и Оптики
Кафедра Систем Управления и Информатики
Лабораторная работа № 3
" Идентификация линейных динамических систем "
по курсу "Идентификация и диагностика систем
|
Выполнили: |
Студенты гр. 4145 Годгильдиев А.М. Пронин В.О. |
|
Преподаватель: |
Лукьянова Г.В. |
Санкт-Петербург
2007 г.
Цель работы:исследование задачи идентификации линейных стационарных динамических систем рекуррентным методом наименьших квадратов.
Рассматриваются линейные стационарные объекты, описываемые уравнениями ВВ:
![]() , где
, где
![]() -
входная последовательность,
-
входная последовательность,
![]() -
выходная последовательность,
-
выходная последовательность,
![]() -
дискретное время.
-
дискретное время.
Измерения выхода ![]() производятся в дискретные моменты времени
производятся в дискретные моменты времени
![]() и сопровождаются аддитивными ошибками
наблюдения, так что измеряемый выходной сигнал равен:
и сопровождаются аддитивными ошибками
наблюдения, так что измеряемый выходной сигнал равен:
![]() , где
, где
 -
дискретная передаточная функция объекта идентификации,
-
дискретная передаточная функция объекта идентификации,
![]() -
передаточная функция формирующего фильтра в канале помехи,
-
передаточная функция формирующего фильтра в канале помехи,
![]() -
дискретный белый шум с параметрами (0,1),
-
дискретный белый шум с параметрами (0,1),
![]() -
оператор сдвига вперед.
-
оператор сдвига вперед.
Для оценки неизвестного параметра используется рекуррентный метод наименьших квадратов:
![]()
Изначально выбирается начальное
значение ![]() (случай отсутствия априорной информации) и
(случай отсутствия априорной информации) и
![]() - достаточно большое положительное число.
- достаточно большое положительное число.
Схемамоделирования:
а) Дисперсия входного сигнала = 0
Дисперсия помехи = 0
Начальное b = 100000
Константа момента остановки = 0.000001
Вектор истинных значений TETA: [а1;…;аn] = [0.1; 0.2; 0.3]
Вектор истинных значений TETA: [b1;…;bn] = [1; 2; 3]
Результаты вычислений:
Оценка teta на t шаге = [0.099997; 0.2; 0.3; 0.99999; 2; 3]
Количество проделанных шагов = 9
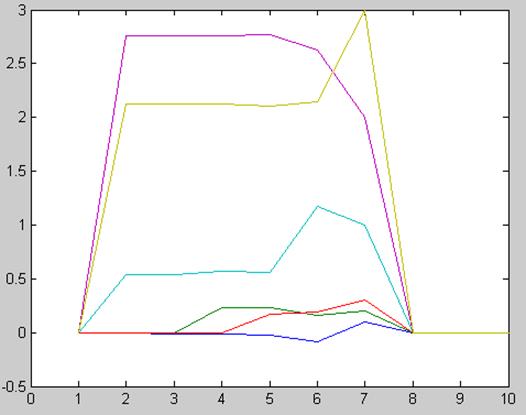
График моделирования:
Q
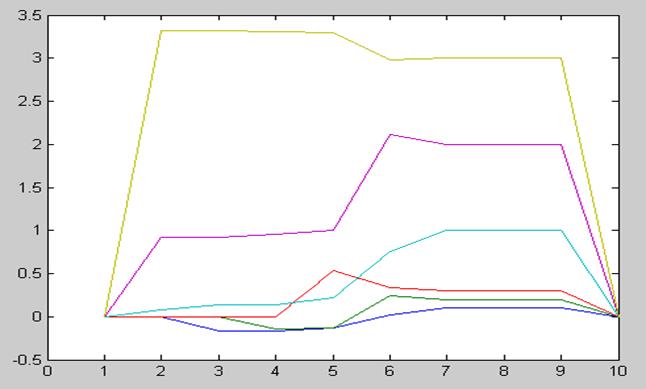
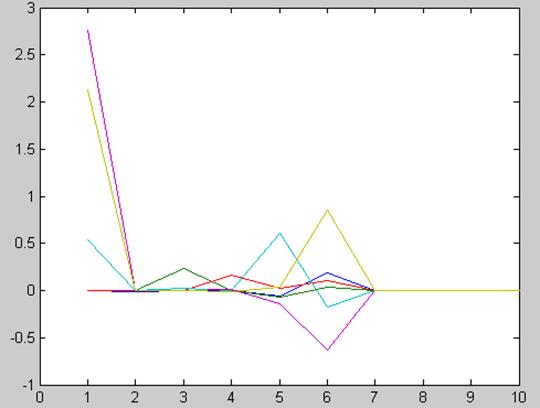
Ошибка оценки:
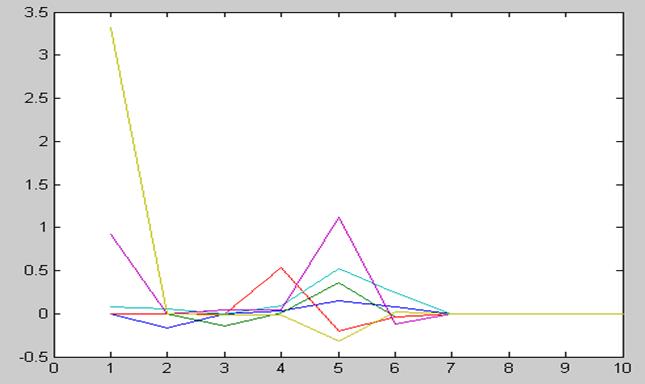 M
M
б) Дисперсия входного сигнала = 1
Дисперсия помехи = 0
Начальное b = 100000
Константа момента остановки = 0.000001
Вектор истинных значений TETA: [а1;…;аn] = [0.1; 0.2; 0.3]
Вектор истинных значений TETA: [b1;…;bn] = [1; 2; 3]
Результаты вычислений:
Оценка teta на t шаге = [0.099997; 0.2; 0.3; 0.99999; 2; 3]
Количество проделанных шагов = 9
График моделирования:
Q
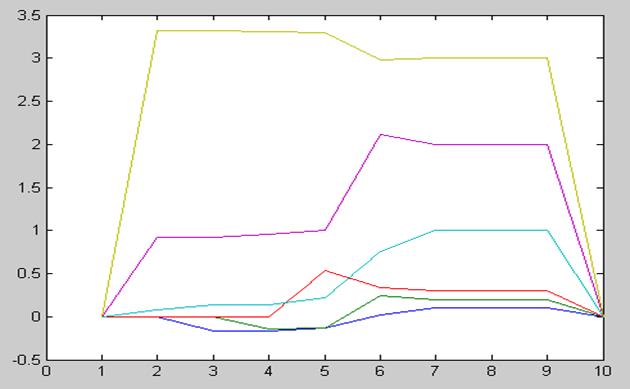
Ошибка оценки:
 M
M
в) Дисперсия входного сигнала = 0
Дисперсия помехи = 0.1
Начальное b = 100000
Константа момента остановки = 0.000001
Вектор истинных значений TETA: [а1;…;аn] = [0.1; 0.2; 0.3]
Вектор истинных значений TETA: [b1;…;bn] = [1; 2; 3]
Результаты вычислений:
Оценка teta на t шаге = [0.099997; 0.2; 0.3; 0.99999; 2; 3]
Количество проделанных шагов = 9
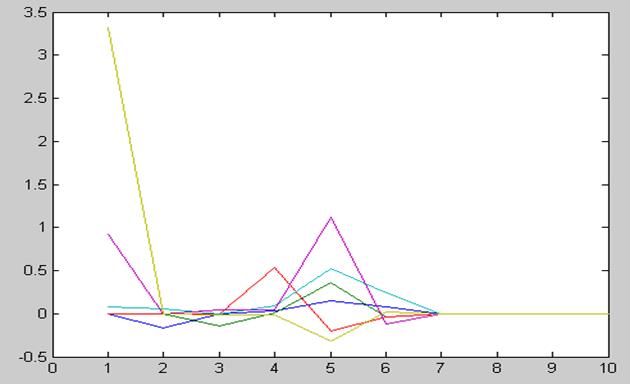
График моделирования:
Q
Ошибка оценки:
M
г) Дисперсия входного сигнала = 0
Дисперсия помехи = 0
Начальное b = 1000
Константа момента остановки = 0.000001
Вектор истинных значений TETA: [а1;…;аn] = [0.1; 0.2; 0.3]
Вектор истинных значений TETA: [b1;…;bn] = [1; 2; 3]
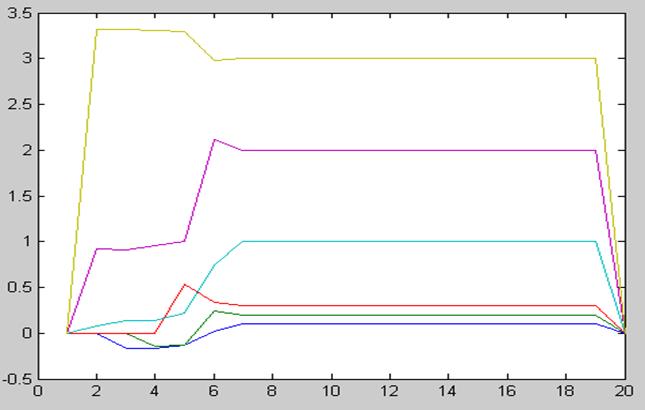
Результаты вычислений:
Оценка teta на t шаге = [0.099701; 0.20016; 0.29977; 0.99939; 2.0003; 2.9999]
Количество проделанных шагов = 19
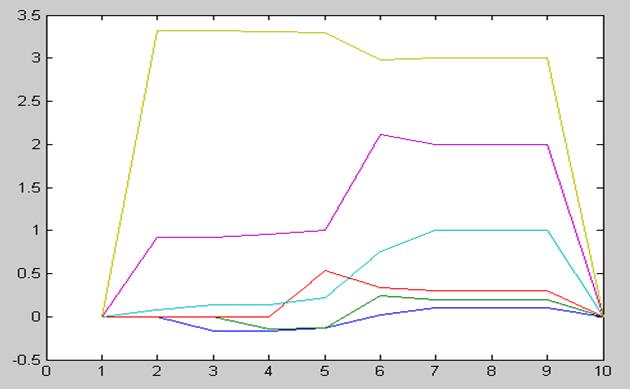
График моделирования:
Q
Ошибка оценки:
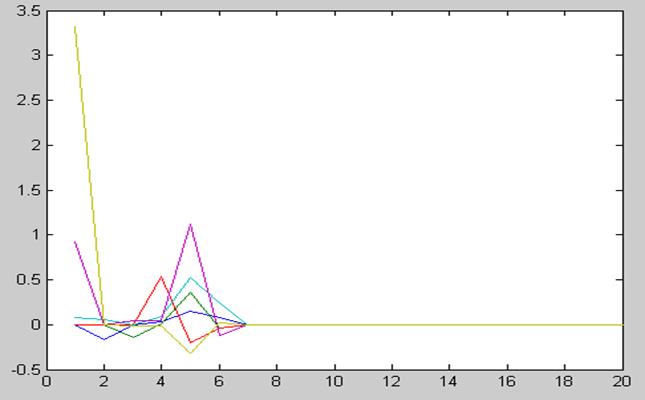 M
M
д) Дисперсия входного сигнала = 0
Дисперсия помехи = 0
Начальное b = 1000000
Константа момента остановки = 0.001
Вектор истинных значений TETA: [а1;…;аn] = [0.1; 0.2; 0.3]
Вектор истинных значений TETA: [b1;…;bn] = [1; 2; 3]
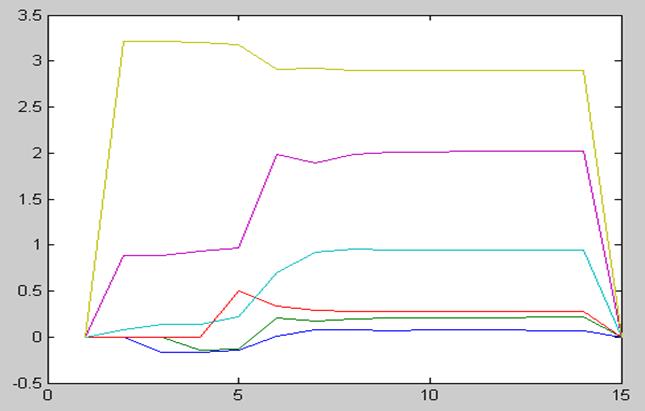
Результаты вычислений:
Оценка teta на t шаге = [0.072129; 0.21405; 0.27801; 0.94321; 2.0261; 2.9952]
Количество проделанных шагов = 14
График моделирования:
Q
Ошибка оценки:
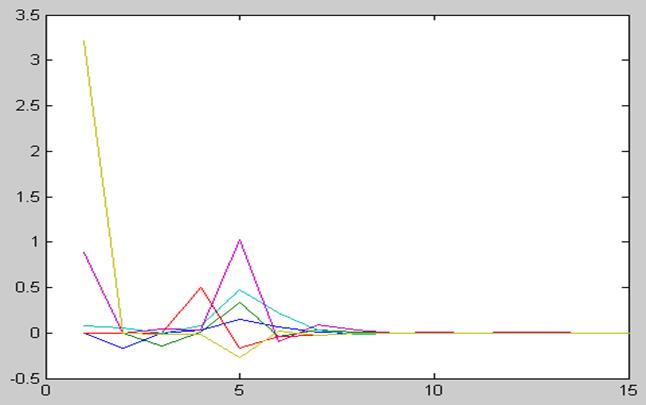 M
M
а) Дисперсия входного сигнала = 0.1
Дисперсия помехи = 0.1
Начальное b = 100000
Константа момента остановки = 0.000001
Вектор истинных значений TETA: [а1;…;аn] = [0.1; 0.2; 0.3]
Вектор истинных значений TETA: [b1;…;bn] = [1; 2; 3]
Результаты вычислений:
Оценка teta на t шаге = [0.099988; 0.20001; 0.3; 0.99996; 1.9999; 2.9999]
Количество проделанных шагов = 12
График моделирования:
Q
Ошибка оценки:
 M
M
б) Дисперсия входного сигнала = 0.5
Дисперсия помехи = 0.1
Начальное b = 100000
Константа момента остановки = 0.000001
Вектор истинных значений TETA: [а1;…;аn] = [0.1; 0.2; 0.3]
Вектор истинных значений TETA: [b1;…;bn] = [1; 2; 3]
Результаты вычислений:
Оценка teta на M шаге = [0.099996; 0.2; 0.3; 0.99999; 2; 3]
Количество проделанных шагов = 11
График моделирования:
Q
Ошибка оценки:
 M
M
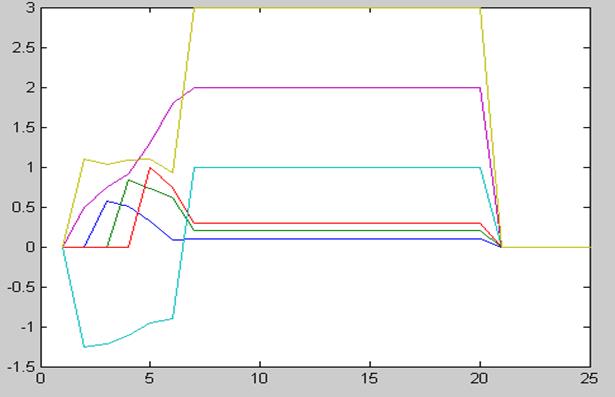
в) Дисперсия входного сигнала = 0.1
Дисперсия помехи = 0.5
Начальное b = 100000
Константа момента остановки = 0.000001
Вектор истинных значений TETA: [а1;…;аn] = [0.1; 0.2; 0.3]
Вектор истинных значений TETA: [b1;…;bn] = [1; 2; 3]
Результаты вычислений:
Оценка teta на t шаге = [0.099995; 0.2; 0.3; 0.99999; 2; 3]
Количество проделанных шагов = 20
График моделирования:
Q
Ошибка оценки:
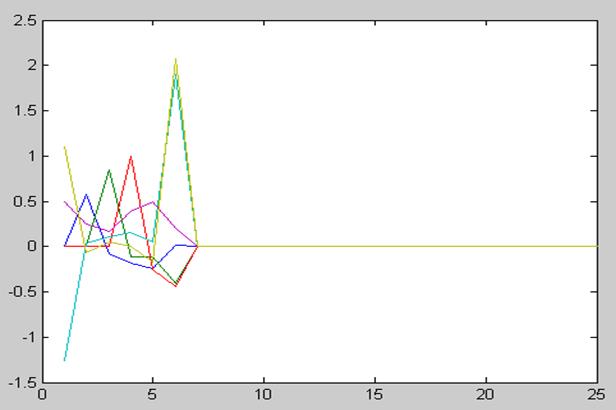 M
M
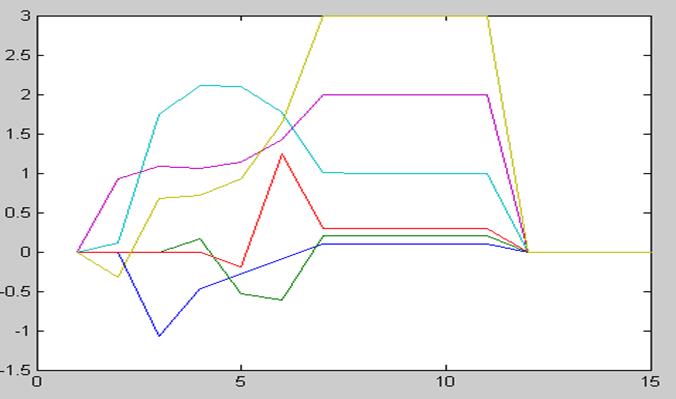
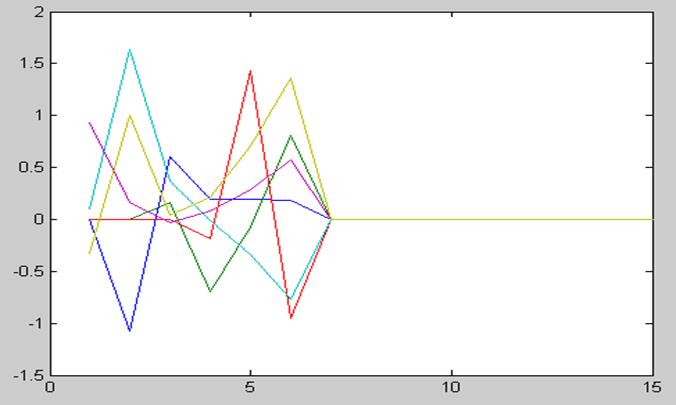
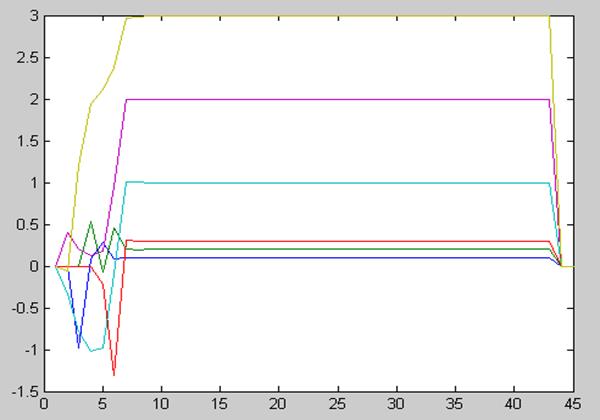
г) Дисперсия входного сигнала = 0.1
Дисперсия помехи = 0.1
Начальное b = 1000
Константа момента остановки = 0.000001
Вектор истинных значений TETA: [а1;…;аn] = [0.1; 0.2; 0.3]
Вектор истинных значений TETA: [b1;…;bn] = [1; 2; 3]
Результаты вычислений:
Оценка teta на t шаге = [0.0998; 0.2; 0.29999; 0.99986; 1.9991; 2.9989]
Количество проделанных шагов = 43
График моделирования:
Q
Ошибка оценки:
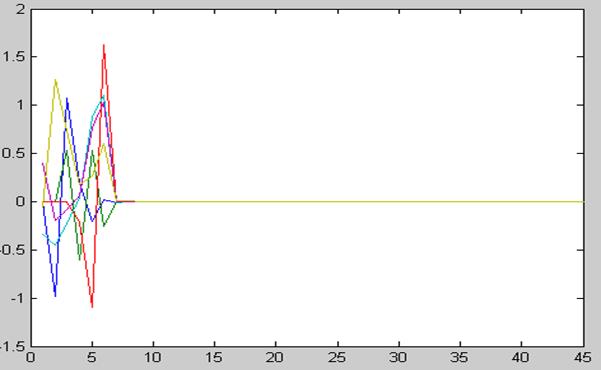 M
M
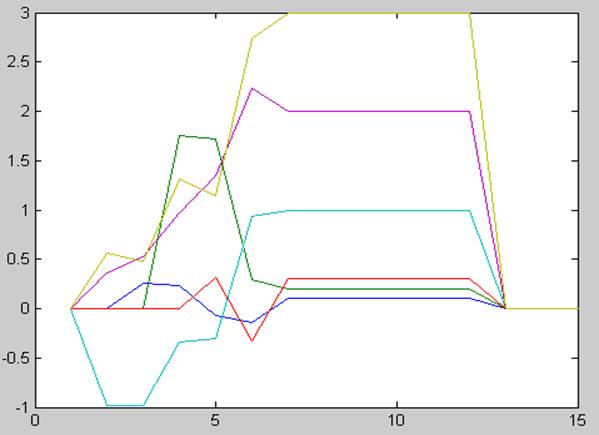
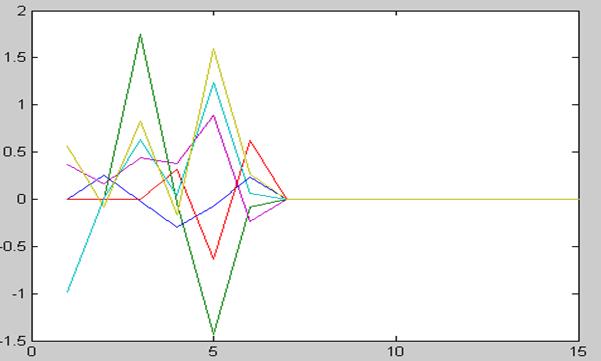
д) Дисперсия входного сигнала = 0.1
Дисперсия помехи = 0.1
Начальное b = 100000
Константа момента остановки = 0.001
Вектор истинных значений TETA: [а1;…;аn] = [0.1; 0.2; 0.3]
Вектор истинных значений TETA: [b1;…;bn] = [1; 2; 3]
Результаты вычислений:
Оценка teta на t шаге = [0.099946; 0.20002; 0.29999; 0.99991; 2.001; 2.9997]
Количество проделанных шагов = 7
График моделирования:
Q
Ошибка оценки:
 M
M
Вывод: Как и в предыдущей работе мы воспользовались рекуррентным методом наименьших квадратов. Однако, на этот раз нами была рассмотрена не статическая, а стационарная динамическая система. Опыт показал, что для исследования динамических систем большого числа шагов(как в статических системах) не требуется для оценки системы. Также следует отметить то, что оценка параметров в данном случае происходит с очень высокой точностью.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.