![]()

Из (4) коэффициент трения ![]() может быть переписан
может быть переписан
![]()
 , где
, где
 строго положительна. Так как
строго положительна. Так как ![]() используется в качестве управляющей
переменной, выберем стабилизирующую функцию в виде
используется в качестве управляющей
переменной, выберем стабилизирующую функцию в виде
![]()

где ![]() — положительная
константа, требующая определения.
— положительная
константа, требующая определения.
Выбрав соответствующую фазовую переменную ошибки
![]()
![]() , преобразуем
результирующее соотношение (10)
, преобразуем
результирующее соотношение (10)
![]()
Производная от переменной ![]() вычисляется
как
вычисляется
как
![]()
где



Из (15) выразим входную управляющую
переменную ![]()
![]()
где ![]() — положительная
константа, значение которой будет выбрано позже.
— положительная
константа, значение которой будет выбрано позже.
![]() Активная
подвеска регулирует нормальную силу, когда к колёсам прикладывается тормозной
момент. Нормальная сила выражается как сумма веса автомобиля и динамически
изменяющейся силы со стороны активной подвески. Когда тормозной момент
возрастает, нормальная сила тоже должна увеличиваться и наоборот. Соотношение,
связывающее желаемую нормальную силу и тормозной момент, представляется в виде
Активная
подвеска регулирует нормальную силу, когда к колёсам прикладывается тормозной
момент. Нормальная сила выражается как сумма веса автомобиля и динамически
изменяющейся силы со стороны активной подвески. Когда тормозной момент
возрастает, нормальная сила тоже должна увеличиваться и наоборот. Соотношение,
связывающее желаемую нормальную силу и тормозной момент, представляется в виде
![]() ,
,
![]() здесь
здесь ![]() — коэффициент нормальной силы, вызванной
действием усилителя активной подвески и
— коэффициент нормальной силы, вызванной
действием усилителя активной подвески и ![]() —
желаемая нормальная сила. Поэтому обратношаговый алгоритм работы активной
подвески строится таким образом, чтобы ввести следующую фазовую переменную
ошибки
—
желаемая нормальная сила. Поэтому обратношаговый алгоритм работы активной
подвески строится таким образом, чтобы ввести следующую фазовую переменную
ошибки
![]() .
.
Найдём производную от переменной ![]()
![]()
Выразим из (19) управляющую силу ![]() :
:
![]()
где
![]() — положительная константа.
— положительная константа.
![]() После завершения
процесса нелинейного обратношагового проектирования управляющего воздействия
для анализа устойчивости системы рассмотрим функцию Ляпунова
После завершения
процесса нелинейного обратношагового проектирования управляющего воздействия
для анализа устойчивости системы рассмотрим функцию Ляпунова
 .
.
Используя (6)–(20), найдём производную от функции Ляпунова
![]()
Так как
функция ![]() всегда положительна,
всегда положительна, ![]() ,
, ![]() и
и ![]() — скорость автомобиля, всегда
положительная при торможении, то можно сделать вывод, что
— скорость автомобиля, всегда
положительная при торможении, то можно сделать вывод, что ![]() является отрицательно определенной
функцией при подходящем выборе коэффициентов
является отрицательно определенной
функцией при подходящем выборе коэффициентов ![]() ,
, ![]() ,
, ![]() .
Результаты показывают, что система ошибок
.
Результаты показывают, что система ошибок ![]() асимптотически
устойчива в соответствии с теоремой об устойчивости Ляпунова. В результате
контроллеры АБС и системы активной подвески могут обеспечить тормозную систему требуемой
нормальной силой, удержать коэффициент проскальзывания колеса
асимптотически
устойчива в соответствии с теоремой об устойчивости Ляпунова. В результате
контроллеры АБС и системы активной подвески могут обеспечить тормозную систему требуемой
нормальной силой, удержать коэффициент проскальзывания колеса ![]() близким к его оптимальному значению
близким к его оптимальному значению ![]() и, в конечном итоге, уменьшить тормозной
путь.
и, в конечном итоге, уменьшить тормозной
путь.
Раздел 3. Результаты моделирования
Зададим параметры моделирования системы, объединяющей АБС и систему активной подвески:
А также выберем следующие постоянные:
Дорожная поверхность соответствует сухому
асфальту. Максимальный тормозной момент, развиваемый АБС, ограничивается 1500 Н![]() м, максимальная сила, вызванная действием
усилителя активной подвески, принимается равной 3000 Н, ограничение на
перемещение подвески задается равным
м, максимальная сила, вызванная действием
усилителя активной подвески, принимается равной 3000 Н, ограничение на
перемещение подвески задается равным ![]() см. Начальная скорость
автомобиля
см. Начальная скорость
автомобиля ![]() равна 30 м/с, а соответствующее значение
угловой скорости колеса
равна 30 м/с, а соответствующее значение
угловой скорости колеса ![]() равно 102.5 рад/с;
начальное ускорение автомобиля
равно 102.5 рад/с;
начальное ускорение автомобиля ![]() .
.
Ниже приведены графики зависимости контролируемых величин от времени при трёх режимах торможения:
· С применением АБС и активной подвески;
· С использованием только АБС;
· С постоянным тормозным моментом.
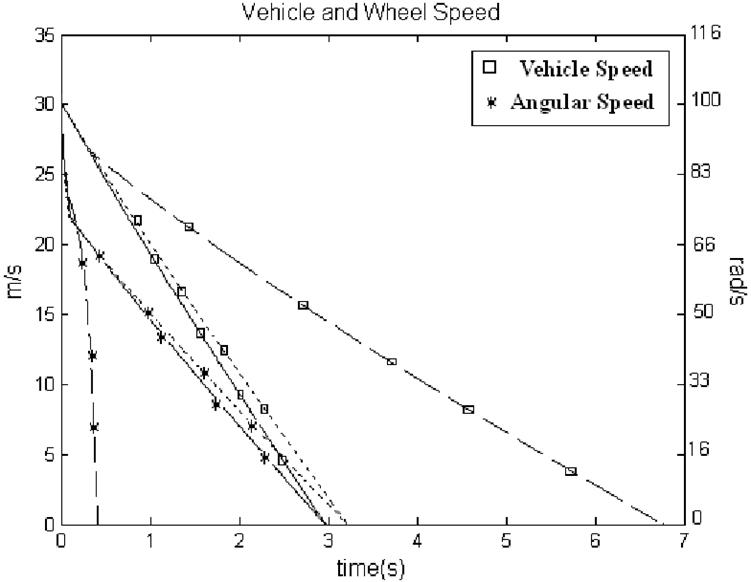
Рис. 3: Линейные скорости автомобиля и колеса при различных режимах
торможения
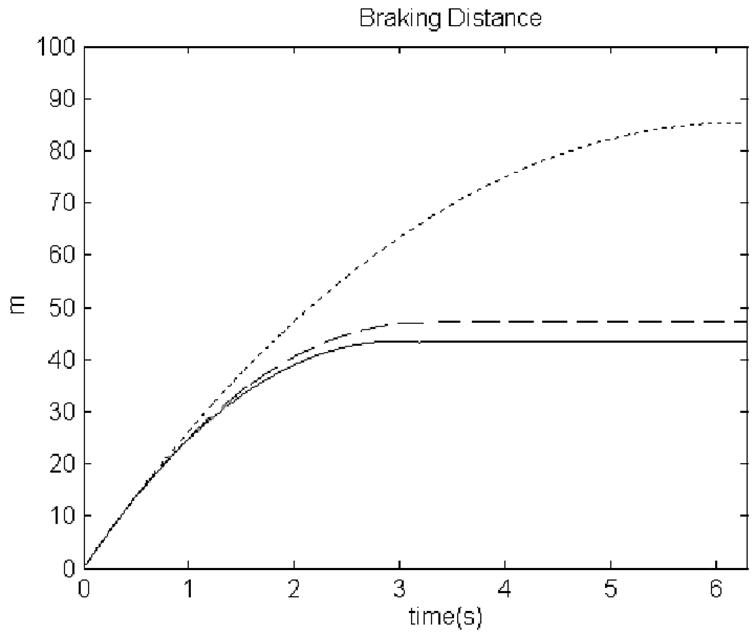
Рис. 4: Тормозной путь автомобиля при различных режимах торможения
Из графиков видно, что тормозной путь автомобиля, оборудованного антиблокировачной системой тормозов, в два раза меньше аналогичного показателя, показываемого автомобилем без АБС и системы активной подвески. При этом время, затрачиваемое на торможение, сокращается более, чем в два раза.
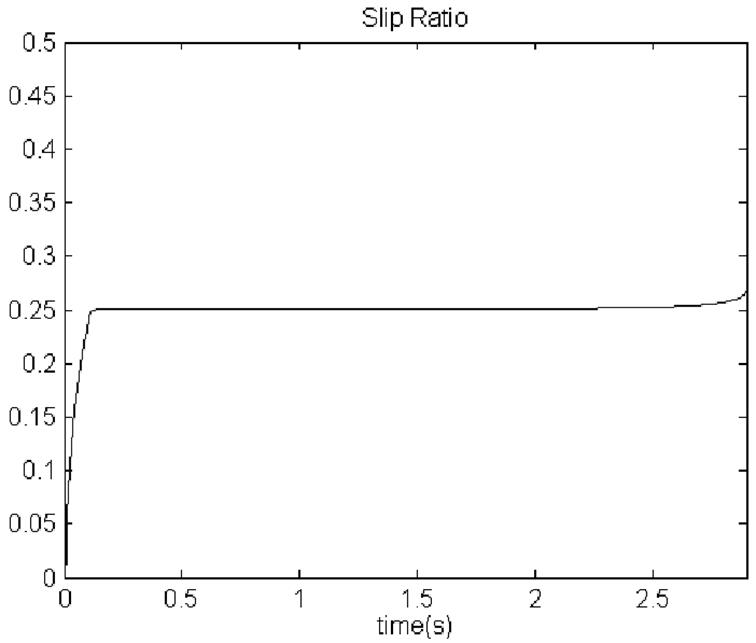
Рис. 5. Коэффициент проскальзывания ![]()
Отметим, что в течение практически всего времени торможения значение коэффициента проскальзывания удерживается на оптимальном для данных дорожных условий уровне 0.25.
Заключение. Выводы
В этой работе была разработана модель управления антиблокировочной системой торможения транспортного средства, совмещенной с активной подвеской. А также были спроектированы отдельные контроллеры для этих двух подсистем и предложен алгоритм, согласовывающий их работу. Из результатов моделирования видно, что исследуемая комбинированная система показывает хорошие результаты при торможении автомобиля — существенно уменьшается время торможения и тормозной путь.
Так как реализованная модель описывает поведение транспортного средства, движущегося лишь на одном колесе, то очевидна необходимость проектирования более совершенной модели четырёхколёсного транспортного средства, точнее описывающей движение реального автомобиля. Здесь появляются свои особенности. А именно, необходимо учитывать то, что масса автомобиля распределена между передней и задней осями подвески, к тому же нормальные реакции отдельных колёс динамически изменяются в зависимости от характера движения транспортного средства (например, при торможении сильнее нагружаются передние колёса, а при повороте — колёса, более близкие к оси вращения автомобиля). В дополнении к этому, нужно будет учитывать тот факт, что правые и левые колёса могут двигаться по разным дорожным покрытиям, а значит и тормозить они тоже должны по-разному.
В работе не были рассмотрены многие важные вопросы, к примеру, характер торможения при рулевом управлении автотранспортом, или особенности оценивания дорожного покрытия и построения по этим данным зависимости силы трения от значения коэффициента скольжения. Тем не менее, построенная модель всё же даёт возможность качественно описать процесс торможения автомобиля, а также оценить влияние на него антиблокировочной системы тормозов, объединённой с системой активной подвески.
Библиографическийсписок
· Yonggon Lee and Stanislaw H. Zak. Designing a genetic neural fuzzy antilock-brake-system controller.
· Wei-En Ting and Jung-Shan Lin. Nonlinear control design of anti-lock braking systems combined with active suspensions.
· B. Ewers, J. Bordeneuve-Guibé, Corinne Langlois. A symbolic sensor for an antilock brake system of a commercial aircraft.
· Jingang Yi, Luis Alvarez, Roberto Horowitz. Adaptive emergency braking control with underestimation of friction coefficient.
· Mark Denny. The dynamics of antilock brake systems.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.