БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра радиотехнических систем
Отчет
по лабораторной работе №2
“ИССЛЕДОВАНИЕ ДЕТЕРМИНИРОВАННЫХ ПРОЦЕССОВ
В СИСТЕМЕ САМОНАВЕДЕНИЯ”
по курсу «Системы радиоуправления»
|
Выполнил ст. группы 041201 Типун И.Ф. |
Проверил Демидович Г.Н. |
Минск 2004
1. Цель работы:
а)исследование детерминированных процессов в системе самонаведения;
б)определить величину ошибки при статическом воздействии, при линейно изменяющемся воздействии и воздействии, изменяющемся по квадратичному закону.
2. Ход работы:
2.1. Изучение обобщенной функциональной схемы системы самонаведения
Функциональные схемы систем самонаведения различаются видом координатора (К), устройством формирования команд (УФК), типом автопилота (АП) и ракеты (Р). На рис.1 приведена обобщенная функциональная схема системы самонаведения.
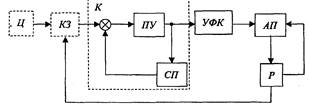
Рис. 1. Обобщенная функциональная схема системы самонаведения
В соответствии с функциональной схемой и математическими моделями входящих в нее динамических звеньев, составим структурную схему контура системы самонаведения по методу пропорционального сближения (рис. 2).
В структурной схеме учтены источник случайного воздействия - угловой шум цели nц(0, а также случайные возмущения в виде эквивалентного шума на выходе пеленгационного устройства nп(t) и аэродинамические возмущения na(t), действующие на ракету в полете, которые проявляются в виде случайных отклонений угла атаки.
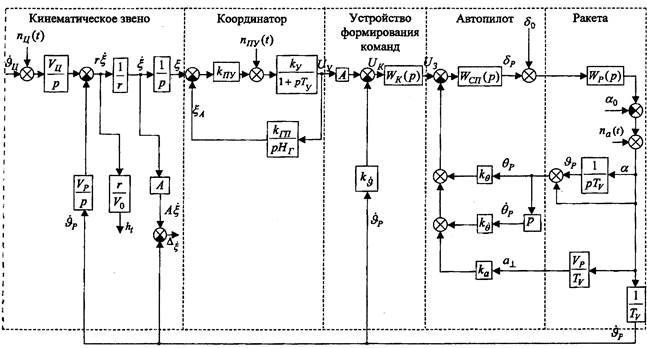
Рис. 2. Структурная схема контура системы самонаведения по методу пропорционального сближения
2.2. В среде MatLab собираем структурную схему контура самонаведения (рис.2.)
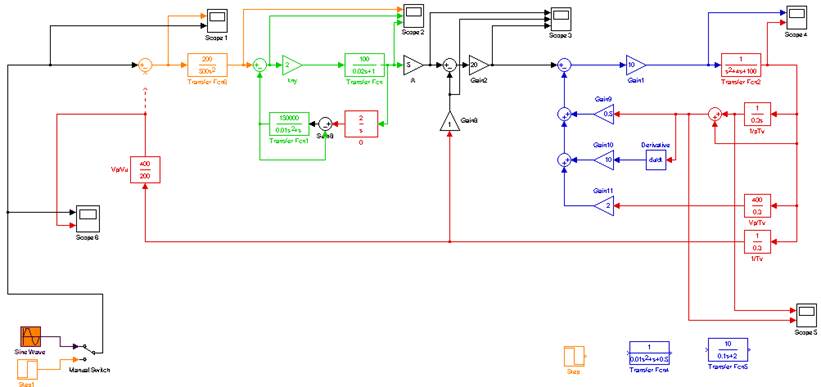
Рис.3. Структурная схема (устойчивая), собранная в среде MatLab
2.3. Проверка структурных схем на устойчивость (графический анализ)
|
№ сх |
№ Scope |
С ООС |
Без ООС |
Вывод |
|
1 |
Scope 6 |
|
|
Не устойчива |
|
2 |
Scope 6 |
|
|
Устойчива |
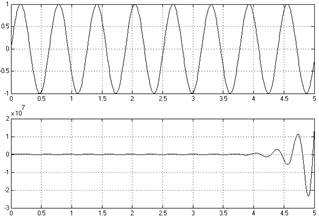
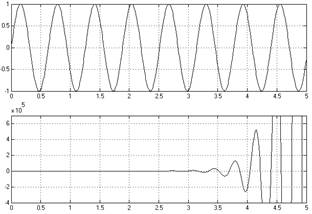
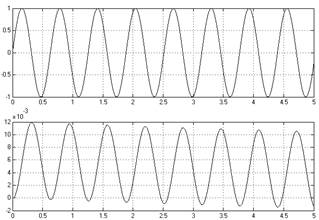
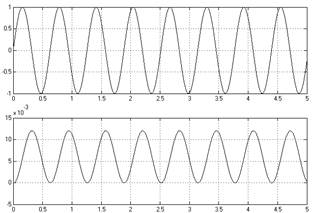
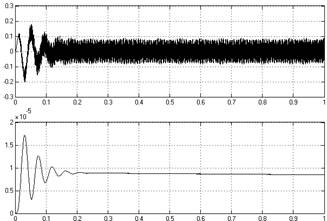
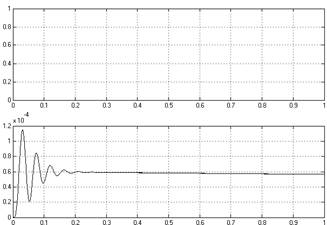
Результаты были получены при задании в генераторе гармонического сигнала частотой f=20рад/с.
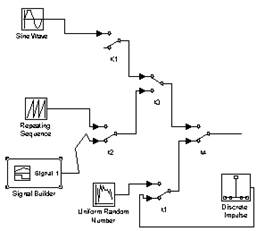
Рис.3.1. Реализация входного воздействия в виде математического представления
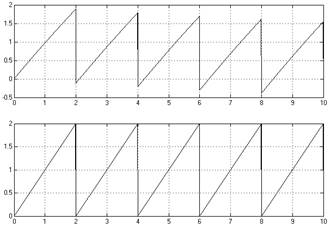
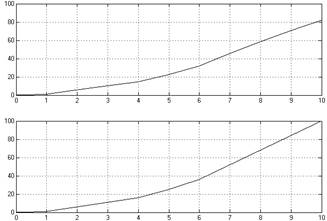
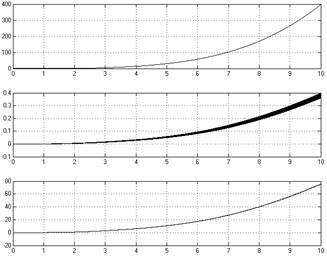
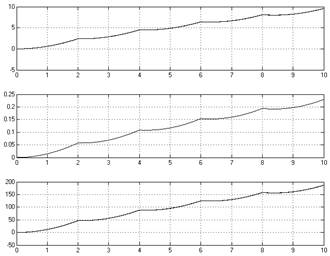
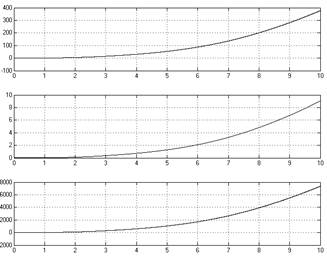
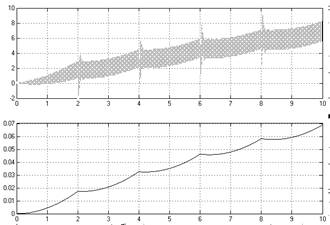
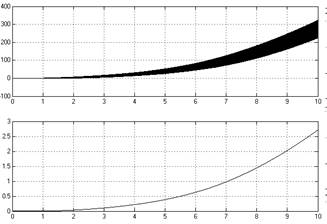
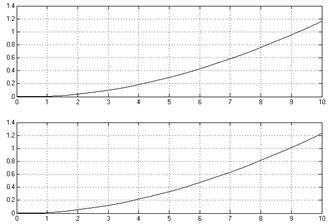
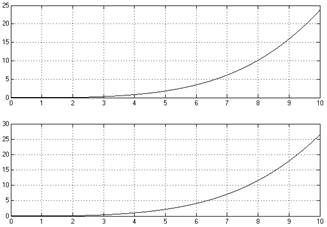
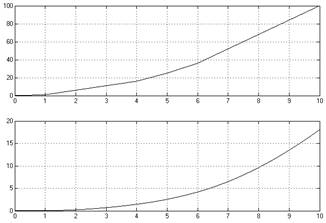
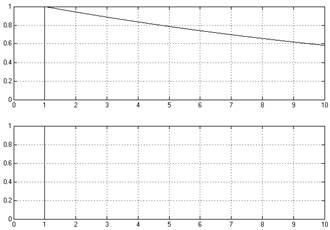
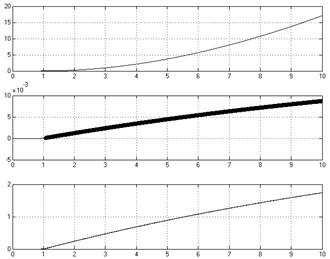
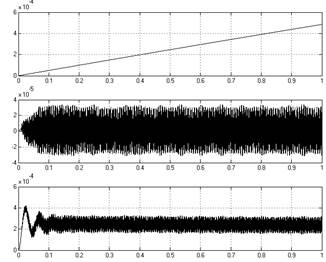
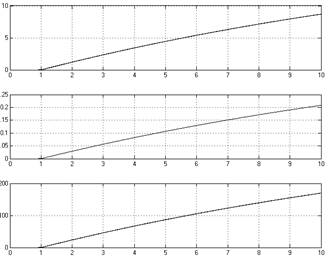
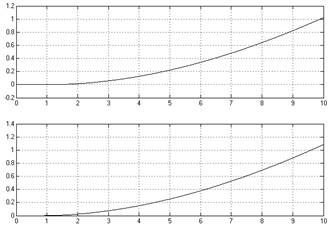
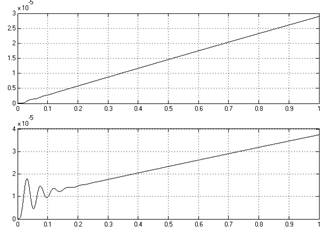
2.4. Снятие графических зависимостей в контрольных точках при воздействии на вход детерминированных процессов (ЛИН, квадратическое воздействие)
|
№ Scope |
На вход воздействует ЛИН |
На вход подается воздействие вида X2 |
|
Scope 1 |
|
|
|
Scope 2 |
|
|
|
Scope 3 |
|
|
|
Scope 4 |
|
|
|
Scope 5 |
|
|
|
Scope 6 |
|
|
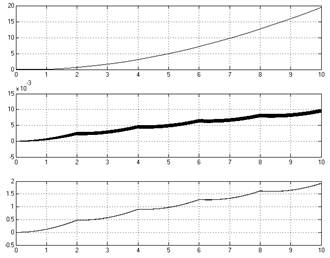
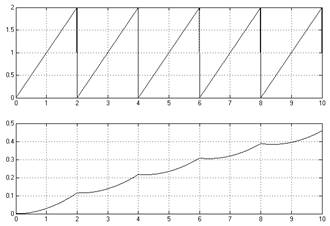
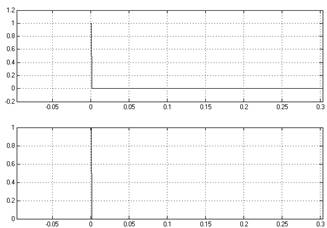
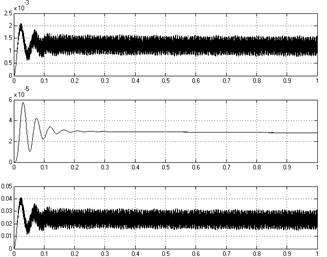
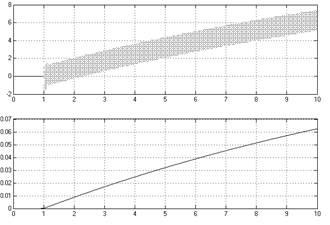
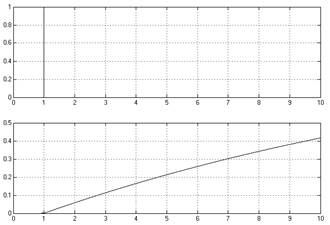
2.5. Снятие графических зависимостей в контрольных точках при воздействии на вход детерминированных процессов (Единичное воздействие)
|
№ Scope |
На вход подается единичное воздействие |
На вход подается единичное воздействие длительностью 0,001 с |
|
Scope 1 |
|
|
|
Scope 2 |
|
|
|
Scope 3 |
|
|
|
Scope 4 |
|
|
|
Scope 5 |
|
|
|
Scope 6 |
|
|
2.6. Получение передаточной функции системы путем математических преобразований структурной схемы в среде MatCad 2001i
![]()
Полученное уравнение является передаточной функцией все системы.
2.7. Построение переходной характеристики системы в среде MatLab v6.5
>>sys=tf([14222222,1422216888,213333332799999,79999999999],[0.53,82,8003395,432068998,167735185740,946602265899,122665711666666,46000000000,0])
Transfer function:
1.422e007 s^3 + 1.422e009 s^2 + 2.133e014 s + 8e010
-------------------------------------------------------------------------------------------------------------------------------------------0.53 s^8 + 82 s^7 + 8.003e006 s^6 + 4.321e008 s^5 + 1.677e011 s^4 + 9.466e011 s^3 + 1.227e014 s^2 + 4.6e010 s
>>step(sys)
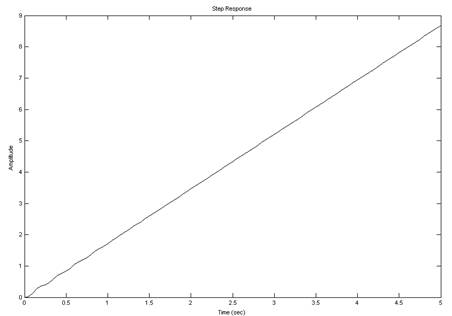
Рис.4. Переходная характеристика системы
2.8. Построение импульсной характеристики системы в среде MatLab v6.5
>>sys=tf([14222222,1422216888,213333332799999,79999999999],[0.53,82,8003395,432068998,167735185740,946602265899,122665711666666,46000000000,0])
Transfer function:
1.422e007 s^3 + 1.422e009 s^2 + 2.133e014 s + 8e010
-------------------------------------------------------------------------------------------------------------------------------------------0.53 s^8 + 82 s^7 + 8.003e006 s^6 + 4.321e008 s^5 + 1.677e011 s^4 + 9.466e011 s^3 + 1.227e014 s^2 + 4.6e010 s
>>impulse(sys)
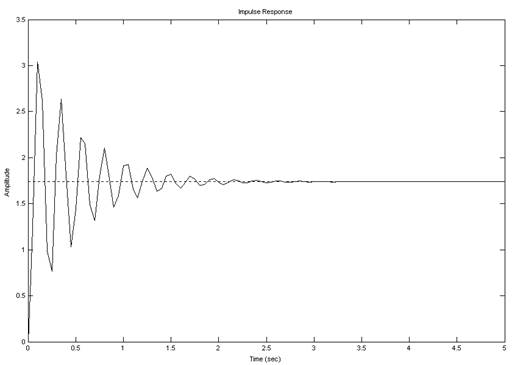
Рис.5. Импульсная характеристика системы
2.9. Построение годографа системы в среде MatLab v6.5
В командной строке MatLab`а вводим следующие команды:
>>sys=tf([14222222,1422216888,213333332799999,79999999999],[0.53,82,8003395,432068998,167735185740,946602265899,122665711666666,46000000000,0])
Transfer function:
1.422e007 s^3 + 1.422e009 s^2 + 2.133e014 s + 8e010
-------------------------------------------------------------------------------------------------------------------------------------------0.53 s^8 + 82 s^7 + 8.003e006 s^6 + 4.321e008 s^5 + 1.677e011 s^4 + 9.466e011 s^3 + 1.227e014 s^2 + 4.6e010 s
>> nyquist(sys)
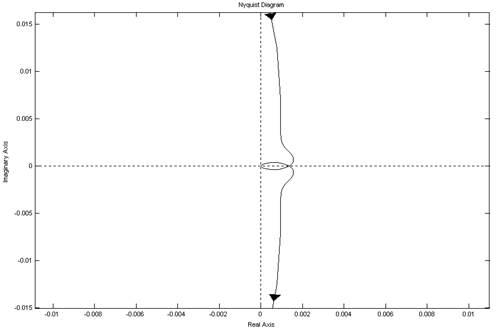
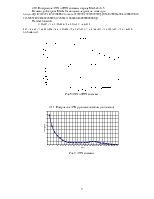
Рис 6. Годограф системы, построенный в среде MatLab v6.5
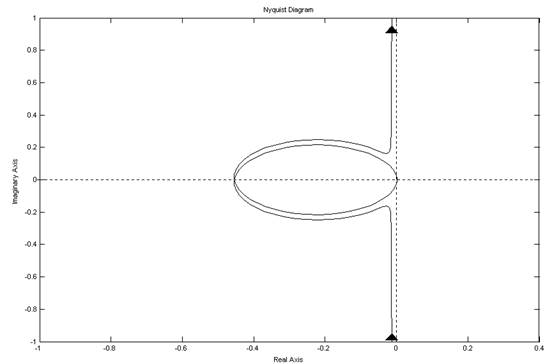
Рис 7. Годограф системы, построенный в среде MatLab v6.5 (увеличение в 6 раз)
2.10. Построение АЧХ и ФЧХ системы в среде MatLab v6.5
В командной строке MatLab`а вводим следующие команды:
>>sys=tf([14222222,1422216888,213333332799999,79999999999],[0.53,82,8003395,432068998,167735185740,946602265899,122665711666666,46000000000,0])
Transfer function:
1.422e007 s^3 + 1.422e009 s^2 + 2.133e014 s + 8e010
-------------------------------------------------------------------------------------------------------------------------------------------0.53 s^8 + 82 s^7 + 8.003e006 s^6 + 4.321e008 s^5 + 1.677e011 s^4 + 9.466e011 s^3 + 1.227e014 s^2 + 4.6e010 s
>> bode(sys)
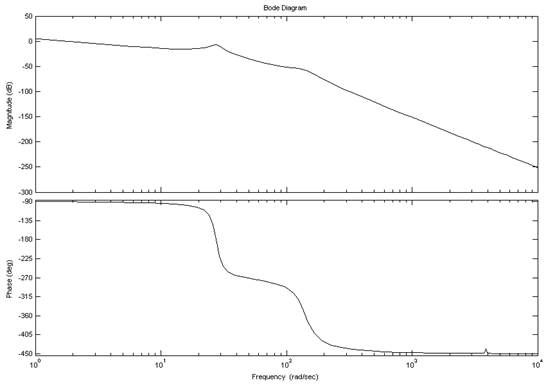
Рис.8.АЧХ и ФЧХ системы
2.11. Построение АЧХ ручным способом (поточечно)
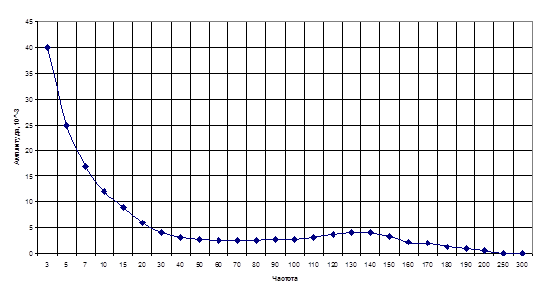
Рис.9. АЧХ системы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.