При переходе с более низкой частоты на высокую fвх<fвых частота гетеродина выбирается равной fген=fвых-fвх и после смесителя выделяется суммарная частота fвых=fвх+fген. При преобразовании сигналов более высокой частоты fвх>fвых, частоте гетеродина, выбирается ниже частоты принимаемого сигнала и на выходе смесителя выделяется разностной частота fвых=fвх-fген . Для стабилизации выходного сигнала в ретрансляторах вводится АРУ. Ретрансляторы выполняют полностью на п/п приборах. Мощность их до 100Вт.
Космические ретрансляторы:
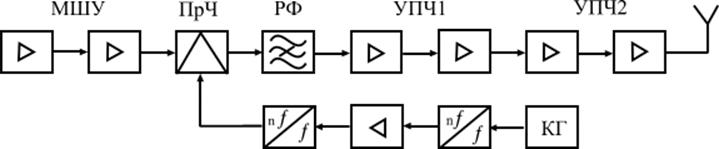 |
При работе в диапазоне в/ч ГГц входные сигналы с частотой ГГц усиливаются в 2-каскадном малошумящем усилителе на арсенид-галиевых транзисторах и преобразуются в сигнал частоты ЧГГу в кольцевом диодном преобразователе с частотой 2,225ГГу. На выходе ПрЧ включен режекторный фильтр РФ. ПрЧ со стороны входа и выхода разведен ферритовыми вентилями. Преобразованный сигнал частоты ЧГГу усиливается до необходимого уровня двумя усилителями на полевых транзисторах. Частота гетеродина формируется следующим образом. От КГ с частотой 123,611МГц напряжение подается на умножители частоты, усиливается и фильтруется микроканаловыми фильтрами.
Передатчики радиолокационных и радионавигационных систем.
Радиолокация решает задачи обнаружения, определения координат и параметров движения различных объектов с помощью отражения или переизлучения радиоволн. Радионавигация решает задачи вождения кораблей, самолетов и других объектов с помощью радиосредств, таким образом, радиолокация и радионавигация тесно связаны общностью основной решаемой задачи: определение координат противника. Во многих случаях р.п. станции используются для решения чисто навигационных задач. Это во многом определяет общность принципов построения передатчиков р.л. и р.п. средств. Классифицируются передатчики по типу построения – однокаскадных и многокаскадных; по виду применяемых в них радиосигналов – простые и сложные, по средствам транспортировки, по диапазонам волн и мощностям, по методу формирования несущего колебания , одночастотные и многочастотные.
По назначению РЛС делятся на:
n системы обнаружения и наведения;
n системы селекции движущихся целей;
n системы автоматического сопровождения целей;
n системы дальнего обнаружения;
n панорамные (для улучшения распознавания целей на фоне отражений от земной и морской поверхностей);
n с высокими частотами повторения зондирующих импульсов (для однозначного определения дальности до цели);
n системы самонаведения;
n наведения управляемых ракет и снарядов.
Наиболее распространенными типами современных многочастотных РЛС являются:
1) Многочастотные РЛС непрерывного излучения;
2) Импульсные РЛС с одновременным излучением нескольких частот;
3) РЛС с череспериодной перестройкой несущей от импульса к импульсу;
4) РЛС со скачкообразным изменением несущей частоты в пределах каждого излучаемого импульса или с излучением в каждом периоде группы импульсов с различными несущими частотами.
Структурная схема передатчика, вырабатывающего кодоманипулированные (КФМ) сигналы изображена на рисунке
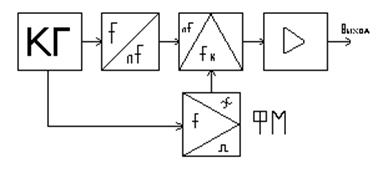 |
Колебания от стабилизированного кварцем задающего генератора КГ поступают одновременно на умножитель частоты и фазовый манипулятор ФМ, в котором осуществляется дискретное изменение фазы ( ). Фазовый манипулятор может быть выполнен на п/п приборах по типовым схемам. Последовательность чередования фаз определяется выбранным кодом. Колебания в ФМ и последнего каскада умножения частоты подаются на смеситель, на выходе которого получаются КФМ сигналы на СВЧ.
Структурные схемы однокаскадных и многокаскадных передатчиков, а также передатчиков с ЛЧМ рассматривались нами ранее в лекциях.
Передатчики с ФАР
Структурная схема передатчика типа активной ФАР выглядит следующим образом:
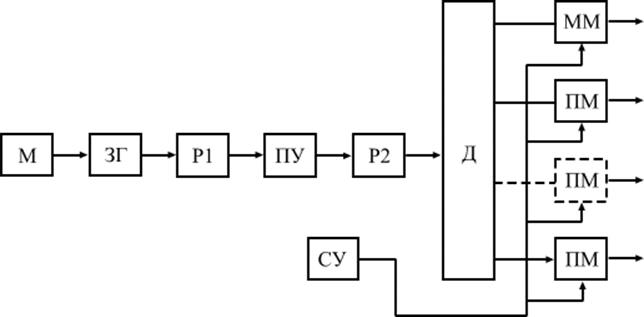 |
Где М – модулятор; ЗГ – задающий генератор; Р1, Р2 – развязывающие устройства; ПУ – каскады предварительного усиления; Д – делитель; СУ – системы управления; ПМ – передающий модуль.
После предварительного усиления и развязки сигнал попадает в делитель Д, где делится на n частей и поступает в n каналов.
Структурная схема ПМ приведена на рисунке
 |
Сигнал от делителя и логического устройства ЛУ усиливается в ПУ, УМ, умножается в УЧ и через полосовой фильтр поступает на элементарный излучатель. Число передающих модулей в АФАР может быть очень большим (до нескольких тысяч). Путем перестройки Ф, достигается регулировка фазы вдоль решетки и таким образом осуществляется электронное сканирование луча системы. Управление фазовращателями производится по определенной программе от системы управления, представляющей собой цифровое вычислительное устройство.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.