





МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Методические указания к лабораторной работе № 3
Последовательный коммуникационный интерфейс SCI
Разработал: Ванцев Д.В.
Утвердил: Трубин В.Г.
Версия от 11 мая 2010 г.
Новосибирск
2010
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
1. МОДУЛЬ SCI
1.1. Общие сведения
1.2. Функциональные характеристики
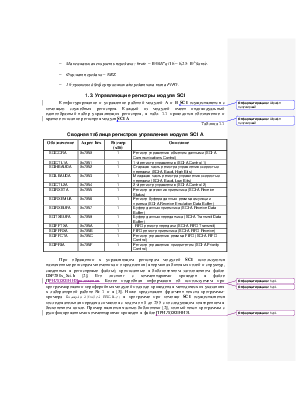
1.3. Управляющие регистры модуля SCI
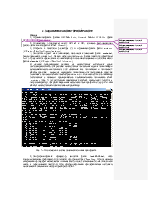
2. ЗАДАНИЯ К ЛАБОРАТОРНОЙ РАБОТЕ
ЛИТЕРАТУРА
ВВЕДЕНИЕ
Микроконтроллеры (МК) и процессоры ЦОС имеют набор периферийных модулей (таймеры-счетчики различной разрядности, процессоры событий, многоканальные АЦП и пр.), состав и количество модулей может существенно различаться в зависимости от семейства, модели и назначения процессора. Однако практически все современные МК имеют «на борту» аппаратные средства поддержки одного или нескольких последовательных интерфейсов обмена данными, таких как SPI, I2C, RS232, RS485, CAN, USB и др. Эти средства используются для организации двухстороннего обмена данными в микропроцессорных системах различного уровня сложности. Например, микроконтроллерное устройство, встроенное в систему управления каким-либо электрооборудованием может снимать показания с различных датчиков и передавать их по последовательному интерфейсу в удаленный на несколько сот метров компьютер. В свою очередь, цифровые датчики и различные периферийные ИС системы могут связываться с МК посредством этих же интерфейсов. Для целей межмодульного или локального обмена данными / сбора данных в пределах одноплатной встраиваемой системы чаще всего используют интерфейсы SPI и I2C; в МК средства поддержки этих интерфейсов выполняются в виде отдельных модулей контроллеров.
Ряд протоколов последовательного обмена (например, RS232) реализуют на базе универсальных модулей типа UART/USART (модуль универсального асинхронного/синхронно-асинхронного приемопередатчика). Основными преимуществами подобных протоколов является их сравнительная простота и легкость программирования, доступность программно-аппаратных средств поддержки (ИС преобразователей интерфейсов типа USB-UART, готовые библиотеки функций в различных программных средах, большое количество примеров применения). В процессорах TI этот модуль называется модулем последовательного коммуникационного интерфейса (serial communication interface – SCI).
Цель данной лабораторной работы – изучение модуля SCI процессоров TMS320F2808 и получение начальных навыков его использования.
1. МОДУЛЬ SCI
1.1. Общие сведения
Процессоры семейства 28xx содержат два модуля последовательного коммуникационного интерфейса (модули SCI). Эти модули обеспечивают асинхронный обмен цифровыми данными между ЦПУ и различными периферийными устройствами, использующими стандартный формат передачи данных Non-Return-to-Zero (NRZ). И передатчик и приемник модуля SCI имеют двойной буфер данных и индивидуальные биты разрешения работы и прерываний. Могут работать по-отдельности или совместно в полнодуплексном режиме. Для того чтобы обеспечить целостность данных в модуле SCI контролируются ошибки паритета, кадрирования и превышения скорости передачи, предусмотрена возможность детектирования сбоев в потоке данных (break detection). 16-разрядный регистр выбора скорости передачи обеспечивает 65000 значений скорости.
1.2. Функциональные характеристики
Каждому из двух модулей SCI присущи следующие характеристики и особенности [1]:
- Два внешних вывода:
SCITXD – выходная линия передатчика SCI;
SCIRXD – входная линия приемника.
Если модуль SCI не задействован, обе линии могут быть использованы в качестве линий общего ввода/вывода GPIO.
- 64К значений программируемой скорости передачи.
- Формат слова данных:
один стартовый бит;
программируемая – в пределах от одного до восьми бит – длина слова;
возможность использования бита паритета по признакам четности/нечетности/равенства;
один или два стоп-бита.
- 4 флага детектирования ошибок: паритета, кадрирования, превышения скорости и сбоя потока данных
- Полу- и полнодуплексный режимы работы.
- Двойная буферизация передаваемых и принимаемых данных
- Возможность реализации работы приемника и передатчика на основе как алгоритмов с использованием прерываний, так и с использованием циклического опроса флагов состояния (поллинга):
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.