1 Классификация фильтров
Функционирование автоматических и автоматизированных систем управления и контроля технологическими процессами и техническими объектами непременно сопровождается разнообразной обработкой измеряемых реализаций сигналов. При этом очень часто возникает необходимость решения следующих задач:
- спектральный анализ сигнала, т.е. выделение совокупности гармонических составляющих определенного диапазона частот; сглаживание сигнала, т.е. уменьшение в реализации сигнала уровня высокочастотных составляющих аддитивной помехи;
- сглаживание сигнала, т.е. уменьшение в реализации сигнала уровня высокочастотными составляющими.
- дифференцирование сигнала, зашумленного аддитивной помехой с высокочастотными составляющими.
Указанные и другие задачи решаются путем применения различных линейных фильтров, представляющих собой линейные динамические звенья. В зависимости от характера обрабатываемого сигнала различают следующие фильтры (см. рис. 1.1):
-
непрерывные фильтры (на входе и выходе действуют
непрерывные сигналы ![]() и
и ![]() ;
;
-
дискретные фильтры (на входе и
выходе действуют дискретные сигналы ![]() и
и ![]() ,
, ![]() – шаг
дискретизации по времени,
– шаг
дискретизации по времени, ![]() , которые разделяются
на рекурсивные и нерекурсивные.
, которые разделяются
на рекурсивные и нерекурсивные.
В современных условиях дискретные фильтры реализуются на основе специализированных цифровых вычислительных устройств, микро- или мини-ЦВМ. При этом возникает эффект конечной разрядности чисел и такие дискретные фильтры принято называть цифровыми.
Математической моделью непрерывного
фильтра является линейное дифференциальное уравнение ![]() -го
порядка
-го
порядка
 ,
, ![]() ,
(1.1)
,
(1.1)
или соответствующая ему передаточная функция
 , где
, где ![]() –
переменная непрерывного преобразования Лапласа,
–
переменная непрерывного преобразования Лапласа,
 ,
,  ,
,  , а
, а ![]() –
импульсная характеристика фильтра.
–
импульсная характеристика фильтра.
Другой формой математической модели непрерывного фильтра может служить интегральное уравнение свертки
 . (1.2)
. (1.2)
Математической моделью рекурсивного
фильтра является линейное разностное уравнение ![]() -го порядка
-го порядка
 ,
, ![]() ,
(1.3)
,
(1.3)
представляющее собой дискретный
аналог дифференциального уравнения (1.1), или соответствующая уравнению (1.3)
передаточная функция , где
, где ![]() –
переменная Z -преобразования,
–
переменная Z -преобразования, ![]() ,
,
 ,
,
 ,
,  , а
, а ![]() –
импульсная характеристика фильтра.
–
импульсная характеристика фильтра.
Математической моделью нерекурсивного фильтра служит дискретная форма интегрального уравнения свертки (1.2) –
 , причем импульсная характеристика
нерекурсивного фильтра является финитной, т.е. имеет конечную длительность –
, причем импульсная характеристика
нерекурсивного фильтра является финитной, т.е. имеет конечную длительность –
![]() при
при ![]() ,
, ![]() при
при
![]() , и его передаточная функция записывается
в виде
, и его передаточная функция записывается
в виде
. (1.4)
2 Типы фильтров по частотным характеристикам
Частотные характеристики непрерывных
фильтров являются непериодическими функциями частоты ![]() и определяются на интервале
и определяются на интервале ![]() . Частотные характеристики дискретных
фильтров представляют собой периодические с периодом
. Частотные характеристики дискретных
фильтров представляют собой периодические с периодом ![]() ,
, ![]() ,
функции частоты
,
функции частоты ![]() , в результате чего они
полностью определяются на интервале
, в результате чего они
полностью определяются на интервале ![]() .
.
В зависимости от характера обработки
входного сигнала фильтры обладают различными амплитудными частотными
характеристиками (АЧХ). При этом могут быть выделены четыре основных
типа фильтров: низкочастотный (НЧФ), полосовой (ПФ), режекторный
(РФ) и высокочастотный (ВЧФ) фильтры, а также представляющий
значительный практический интерес дифференцирующий фильтр (ДФ).
Идеализированные АЧХ данных дискретных фильтров в интервале частот ![]() приведены на рис. 1.2
приведены на рис. 1.2 ![]() 1.6 соответственно.
1.6 соответственно.
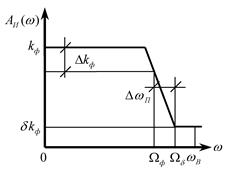
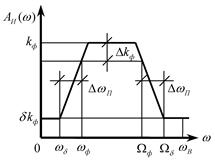
Рис. 1.2. Рис. 1.3.
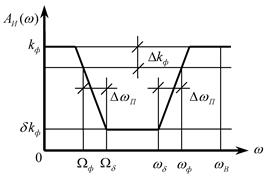
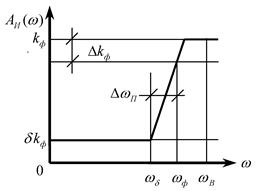
Рис. 1.4. Рис. 1.5.
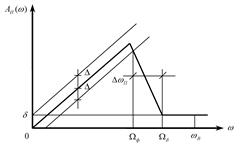 На каждой АЧХ
выделяются полосы:
На каждой АЧХ
выделяются полосы:
1)
полоса пропускания для НЧФ и ДФ ![]() , для ПФ
, для ПФ ![]() , для РФ
, для РФ ![]() и
и ![]() ,
,
для ВЧФ ![]() ;
;
2)
переходная полоса для НЧФ и ДФ ![]() , для ПФ
, для ПФ ![]() и
и ![]()
для РФ ![]() и
и ![]() ,
,
для ВЧФ ![]()
3)
полоса задерживания для НЧФ и ДФ
![]() , для ПФ
, для ПФ ![]() и
и ![]()
для РФ ![]() , для ВЧФ
, для ВЧФ ![]() .
.
Рис.1.6.
![]() и
и ![]() – верхняя и нижняя граничные частоты
полос пропускания,
– верхняя и нижняя граничные частоты
полос пропускания,
![]() и
и ![]() – верхняя и нижняя граничные частоты
переходных полос.
– верхняя и нижняя граничные частоты
переходных полос.
Качество фильтра определяется
относительными (относительно коэффициента усиления фильтра ![]() ) неравномерностями его АЧХ в
полосах пропускания (неравномерность
) неравномерностями его АЧХ в
полосах пропускания (неравномерность ![]() )
и полосах задерживания (неравномерность
)
и полосах задерживания (неравномерность ![]() ),
а также шириной переходных полос (для НЧФ, ВЧФ и ДФ –
),
а также шириной переходных полос (для НЧФ, ВЧФ и ДФ – ![]() ), для ПФ и РФ -
), для ПФ и РФ - ![]() ). Ширину
). Ширину ![]() переходных
полос АЧХ удобно характеризовать относительным параметром
переходных
полос АЧХ удобно характеризовать относительным параметром ![]() в виде:
в виде:
|
|
|
|
 (1.5)
(1.5)
С увеличением параметров ![]() ,
, ![]() и
и
![]() качество фильтра ухудшается.
качество фильтра ухудшается.
В заключение отметим два характерных режима фильтрации:
1) режим реального времени, при котором для вычисления выходного
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




