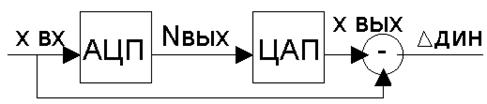
Рассмотрим следующие варианты:
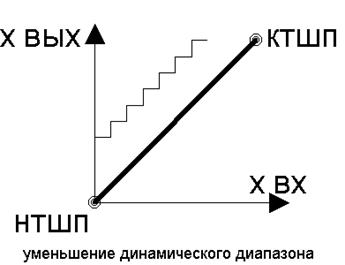
1) происходит уменьшение динамического диапазона входного сигнала. Нужно устранить Uсм
2) Неточность коэффициента преобразования (изменён наклог ХП)
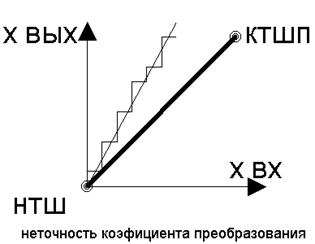
Коэффициент преобразования: N/U размерность: Kпр = N/U = N/(N h) = 1/h = [1/мВ]
т.к. наклон ХП изменяется и зависит от величины h, тоо устраняется подстройкой (увеличение h)
Дифференциальная нелинейность: (разность ступеней квантования представленных цифровыми кодами) Устраняется изменениями технологии изготовления. ДН может приводить к немонотонности ХП. Если ДН превышает величины h, то это может привести к нелинейности ХП, выпадение и пропуску кодов.
Точность АЦП определяется количеством уровней (разрядностью). Выпадение кодов обычно происходит в старших разрядах. Пропуск кода так же связан с динамикой изменения входного сигнала
Разрешающая способность – минимальное напряжение при котором возникает выходной код.
(связано с h)
характеризуют быстродействие АЦП, неразрывно связаны с его точностью при преобразовании переменных сигналов.
1. Период дискретизации Тд (определяется по теореме Котельникова)
где Fв – верхняя частота преобразованного сигнала
Данная формула характеризует кол-во точек, которое необходимо взять чтобы восстановить сигнал с заданной точностью, для чего в формуле введён коэффициент:

в знаменателе корень от погрешности восстановления
2. Частота дискретизации: fд = 1/Tд
3. Пропускная способность – обобщённый параметр
характеризующий производительность АЦП. ![]()
4. Время преобразования (задержка между подачей сигнала и формированием выходного кода)

время преобразования меньше или равно времени дискретизации.
5. Апертурное время (в течении которого сохраняется неопределённость при преобразовании входных сигналов, изменяющихся во времени) Tа
АЦП последовательного приближения: tа = tпр
АЦП параллельные: tа << tпр
Параметры, характеризующие динамическую точность:
1. динамическая погрешность
2. апертурная погрешность
Динамическая погрешность – разница между значениями ЦАП пропорционального выходному коду АЦП и истинному значению входного сигнала в опредёлённый момент времени.
динамическая погрешность выбирается максимальной если динамическая погрешность больше h, - неполадка
Апертурная погрешность – характеризуется погрешностью мгновенного значения преобразуемого сигнала (в требуемый момент времени) относительно момента времени к которому данная выборка относиться.
АП учитывается, когда апертурная неопределённость.
![]()
если dUа < h, то об апертурной погрешности можно забыть
Погрешность возникает из-за:
- инерциональность элементов входящих в состав АЦП
- изменение во времени преобразуемого сигнала
Общая погрешность восстановления:
![]()
(погрешность квантования и погрешность восстановления)
наличие ООС и реверса при преобразовании
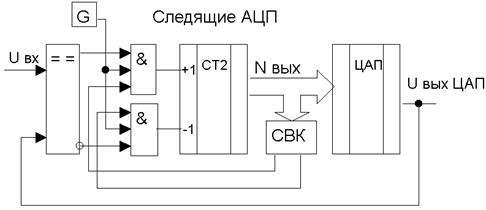
СВК – схема выделения кодов
Если Uвх > UвыхЦАП +1
Если Uвх < UвыхЦАП –1
СВК выделяет комбинацию "все нули" – запретвычитания и "все единицы" – запрет суммирования
Данный преобразователь неустойчив на границах динамического диапазона при наличии помех
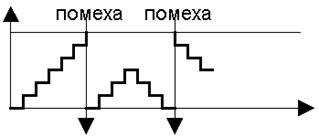
Недостатки:
1) неустойчивость
2) возникновение большой динамической погрешности при измерении быстроменяющихся сигналов
Vсл >= Vизм сигнала, - тогда динамическая погрешность меньше h и преобразование происходит за один такт.
при увеличении h необходимо увеличивать частоту дискретизации.
Применение следящих АЦП:
1. Дельта-модулятор
2. РДМ (разностно-дискретная модуляция) //оконный компаратор (-1 0 1)
3. Определение экстремума функции
4. Устройство сжатия нулевого порядка
5. Фильтр низких частот (счётчик = дискретный интегратор)
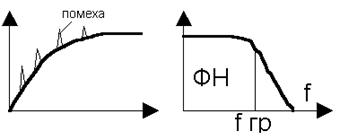
f граничная меняется частой дискретизации (частотой генератора)
за один такт он не может измениться больше чем на 1 и если проходит помеха, то она отсеивается.
Погрешность увеличивается при преобразовании быстроменяющихся сигналов.
Основное условие Vсл >= Vизм.
K*h*fдиск >= Umax*2*pi*fс
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.