








Министерство образования и науки РФ
Государственное образовательное учреждение высшего профессионального образования
Новосибирский Государственный Технический Университет

Кафедра Автоматики
Курсовая работа по дисциплине
"Технические средства автомтики и управления"
Вариант 05
|
Факультет: |
АВТ |
|
Группа: |
АА-86 |
|
Студент: |
Земцов Н. |
|
Преподаватель: |
Русаков О.П. |
|
Дата: |
27.11.2011г. |
Новосибирск, 2011
Освоить методику выбора мощности двигателя постоянного тока для системы управления скоростью.
1. На
основании заданной тахограммы механизма и момента нагрузки ![]() :
:
1.1. Выбрать способ управления двигателем
1.2. Рассчитать среднеквадратическую мощность и сделать предварительный выбор двигателя. При необходимости применить редуктор (мультипликатор). К.П.Д. механизма принять равным 75%
2. Рассчитать
и построить диаграммы токов и моментов при пуске, торможении и в установившемся
движении с учетом п. 1.1. (принять момент пуска и торможения двигателя ![]() )
)
3. Выполнить проверку выбранного двигателя по теплу, используя метод эквивалентного тока или момента
4. Составить математическую модель технической системы, включая усилитель мощности и выполнить оценку параметров модели
5. Рассчитать и построить механические характеристики двигателя для всех режимов работы системы
6. Выполнить моделирование динамических процессов в технической системе (частота вращения, момент двигателя, ток якоря)
N=0 L=5
Таблица 1
|
N |
|
|
|
|
|
|
|
|
0 |
20 |
-30 |
40 |
-50 |
60 |
-70 |
80 |
|
L |
|
|
|
|
|
|
|
|
5 |
2 |
3 |
2 |
3 |
2 |
3 |
2 |
![]() - частота вращения двигателя;
- частота вращения двигателя;
![]() - длительность
интервала работы двигателя при частоте вращения
- длительность
интервала работы двигателя при частоте вращения ![]() ;
;
![]() -
длительность паузы в работе двигателя;
-
длительность паузы в работе двигателя;
![]() -
момент нагрузки - реактивный (момент сухого трения).
-
момент нагрузки - реактивный (момент сухого трения).
4.1. Построение тахограммы механизма
рис 1. Тахограмма механизма
В качестве устройства управления двигателя будем использовать реверсивный широтно-импульсный преобразователь.
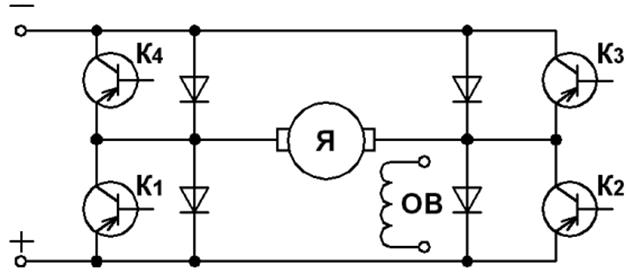
рис 2. Реверсивный широтно-импульсный преобразователь
Управление осуществляется по мостовой схеме, образованной четырьмя транзисторными ключами, к одной диагонали которой подведено напряжение питающей сети, а к другой присоединён якорь двигателя.
Диоды служат для замыкания цепи якоря через источник напряжения в те отрезки времени, когда ток якоря течёт под действием ЭДС самоиндукции навстречу напряжению источника.
Ключи работают одновременно, т.е., например, на первом
интервале замкнуты ключи К1 и К3 и на левый зажим якоря подан плюс, а на втором
интервале замкнуты ключи К2 и К4 и левый зажим подан минус источника. В
результате к двигателю подается напряжение ![]() . Считая
. Считая ![]() и учитывая, что
и учитывая, что ![]() , получим
, получим ![]() . Следовательно механическая характеристика
определится выражением
. Следовательно механическая характеристика
определится выражением ![]() . Изменяя g, можно изменить не
только значение, но и направление угловой скорости. При 1³g³0,5 угловая скорость на холостом
ходе положительна, при 0,5³g³0 - отрицательна.
. Изменяя g, можно изменить не
только значение, но и направление угловой скорости. При 1³g³0,5 угловая скорость на холостом
ходе положительна, при 0,5³g³0 - отрицательна.
Среднеквадратическая мощность:
Мощность на каждом интервале ![]()
Таблица 2
|
|
|
|
|
|
|
|
|
5 |
7,5 |
10 |
12,5 |
15 |
17,5 |
20 |
![]()
![]()
Параметры, которые необходимо учесть при выборе двигателя:
![]() ;
;
![]()
![]()
![]()
![]()
На основе этих требований выберем СЛ-569К:
Таблица 3
|
Номинальное напряжение, В |
110 |
|
Номинальная мощность, Вт |
36 |
|
Номинальный ток возбуждения, А |
- |
|
Номинальный ток якоря, А |
0,8 |
|
Номинальная частота вращения, об/мин |
850 |
|
Номинальный вращающий
момент, |
42 |
|
Момент инерции якоря, |
2,7 |
|
Пусковой момент, |
102 |
|
Статический момент
трения, |
3,5 |
|
Сопротивление обмотки возбуждения, Ом |
492 |
|
Сопротивление обмотки якоря, Ом |
40 |
|
Коэффициент самоиндукции якоря |
290 |
Так как номинальная частота вращения близка к максимальной - редуктор не требуется.
4.2. Расчет и построение диаграмм токов и моментов при пуске, торможение и в установившемся режиме
Момент при пуске двигателя:
![]()
Момент при торможении двигателя:
![]()
Момент в установившемся режиме:
![]()
,где:
![]()
![]() -
статический момент трения
-
статический момент трения
![]()
![]()
![]()
Время пуска и торможения:
,где:
![]() -
момент инерции якоря
-
момент инерции якоря
Таблица 4
|
i |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
9,153 |
13,729 |
18,305 |
22,881 |
27,458 |
32,034 |
36,610 |
|
|
4,655 |
6,983 |
9,310 |
11,638 |
13,966 |
16,293 |
18,621 |
рис 3. Диаграмма моментов во при пуске, торможение и в установившемся режиме
Связь тока якоря и вращающего момента:
![]()
![]()
![]()
![]()
Ток якоря при пуске двигателя:
Ток якоря при торможении двигателя:
Ток якоря в установившемся режиме:
рис 4. Диаграмма токов якоря во при пуске, торможение и в установившемся режиме
4.3. Проверка двигателя по теплу
Воспользуемся методом эквивалентных моментов:

![]() следовательно
двигатель не будет перегреваться
следовательно
двигатель не будет перегреваться
4.4. Математическая модель
Передаточная функция для двигателя имеет вид:

![]()
![]()
![]()

![]()

![]()
![]()
Для расчета параметров усилителя мощности примем параметры выхода регулятора следующими: Iвых.рег = 1мА, Uвых.рег = ±10В. Выходной ток и напряжение (подаваемое на двигатель) Iвых = 0,25А, Uвых = 110В + 20%.
![]()
![]()
![]()
4.5. Механические характеристики
Механическая характеристика определится выражением:
Естественная
характеристика проходит через точку ![]()
рис 5. Механические
характеристики двигателя во всех режимах работы
4.6. Моделирование динамических процессов
рис 6. Математическая модель двигателя
![]()
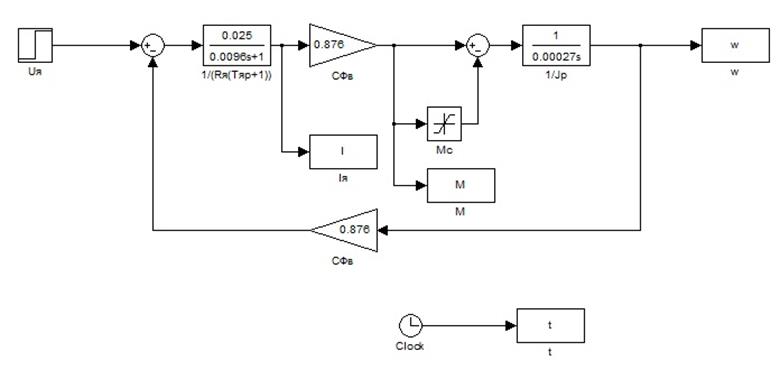
рис 7. Математическая модель двигателя
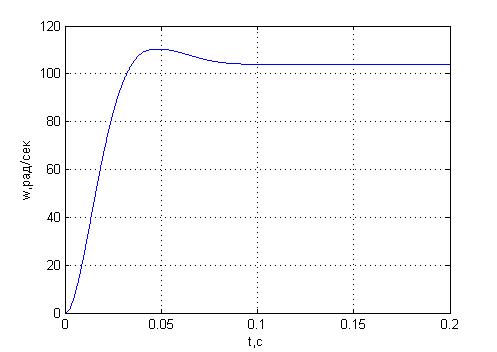
рис 8. Переходный процесс Ω(t)
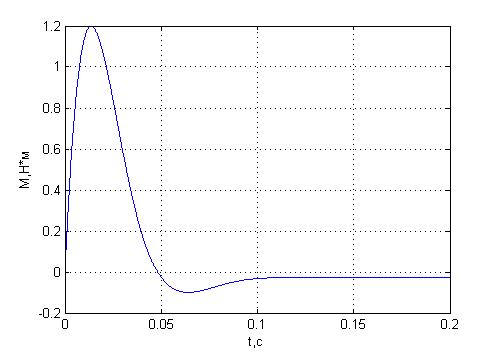
рис 9. Переходный процесс M(t)
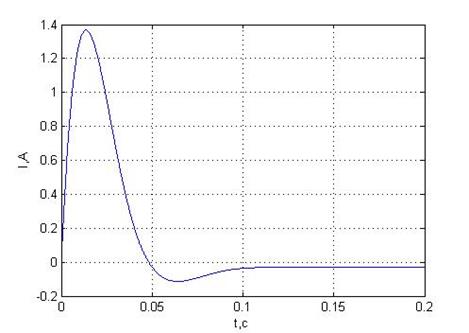
рис 10. Переходный процесс I(t)
Согласно техническому заданию (момент нагрузки, тахограмма) был выбран двигатель СЛ-569К. Этот двигатель подходит по требуемым параметрам (номинальная мощность больше среднеквадратической, номинальный момент больше момента нагрузки, максимальная частота больше требуемых частот по тахограмме). Двигатель прошел проверку по теплу (метод эквивалентных моментов), следовательно он не будет перегреваться.
Моделирование показывает, что выбранный двигатель подходит по динамическим свойствам (переходный процесс меньше 0,1с), а время цикла/паузы не менее 1с по тахограмме.
Следовательно двигатель СЛ-569К можно использовать для решения данной задачи.
1. Волков Н. И., Миловзоров В. П. Электромашинные устройства автоматики. М.: Высшая школа, 1986.
2. Русаков О.П. «Технические средства систем автоматики и управления», курс лекций.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.