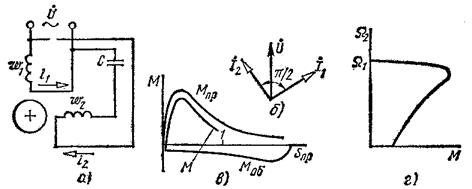
Рис. 4. Электрическая схема (а), векторная диаграмма токов (б), механические характеристики (в, г) конденсаторного двигателя.
Для уменьшения стоимости и массы некоторые двигатели проектируют с
таким расчетом, чтобы обмотка ![]() включалась
только во время пуска, при этом обмотка
включалась
только во время пуска, при этом обмотка ![]() может быть выбрана из более тонкого
провода. После разгона с выключенными обмотками двух фаз обмотка
может быть выбрана из более тонкого
провода. После разгона с выключенными обмотками двух фаз обмотка ![]() отключается, двигатель продолжает работать
и его рабочая точка находится на верхней ветви механической характеристики
(рис. 3).
отключается, двигатель продолжает работать
и его рабочая точка находится на верхней ветви механической характеристики
(рис. 3).
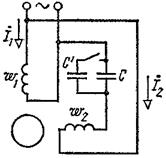
Рис. 5. Электрическая схема конденсаторного двигателя с рабочим и пусковым конденсаторами.
Двигатель с экранированными полюсами. Получить ток ![]() , сдвинутый по фазе относительно
тока
, сдвинутый по фазе относительно
тока ![]() , можно без
конденсатора и даже не подключая обмотку
, можно без
конденсатора и даже не подключая обмотку ![]() к сети. Достаточно замкнуть ее накоротко и
поместить так, чтобы магнитный поток
к сети. Достаточно замкнуть ее накоротко и
поместить так, чтобы магнитный поток ![]() обмотки
обмотки
![]() частично пронизывал витки
обмотки
частично пронизывал витки
обмотки ![]() . Практически обмотку
. Практически обмотку ![]() выполняют из двух витков, которые помещают
в пазы полюсов магнитопровода с обмоткой
выполняют из двух витков, которые помещают
в пазы полюсов магнитопровода с обмоткой ![]() (рис. 6, а).Созданный потоком
(рис. 6, а).Созданный потоком ![]() ток
ток ![]() создает свой поток
создает свой поток ![]() так, что часть магнитного зазора
пронизывается потоком
так, что часть магнитного зазора
пронизывается потоком ![]() , а
другая часть - потоком
, а
другая часть - потоком ![]() .
Потоки
.
Потоки ![]() и
и ![]() имеют временной сдвиг фаз (рис. 6, б), а
оси этих потоков смещены в пространстве. В результате удается создать небольшой
пусковой момент, обеспечивающий начальное движение ротора в направлении
вращения прямого поля.
имеют временной сдвиг фаз (рис. 6, б), а
оси этих потоков смещены в пространстве. В результате удается создать небольшой
пусковой момент, обеспечивающий начальное движение ротора в направлении
вращения прямого поля.
Преимуществами двигателей с экранированными полюсами является простота конструкций и низкая стоимость. Их применяют в приводах с малым статическим противодействующим моментом.
Управляемые двигатели. Управляемые (исполнительные) двигатели применяют в системах автоматического регулирования технологических процессов и для привода устройств, воздействующих на этот процесс. Скорость двигателя должна плавно изменяться под воздействием электрического сигнала управления. При отсутствии такого сигнала двигатель должен останавливаться.
Схема включения двигателя изображена на рис. 7, а. Рабочая обмотка ![]() подключена к сети, а обмотка управления
подключена к сети, а обмотка управления ![]() присоединена к выходу системы
автоматического регулирования (САР). Емкость конденсатора в цепи обмотки
присоединена к выходу системы
автоматического регулирования (САР). Емкость конденсатора в цепи обмотки ![]() подобрана так, что токи
подобрана так, что токи ![]() и
и ![]() сдвинуты по фазе на
сдвинуты по фазе на ![]() /2 (рис. 7, б). Обмотки
/2 (рис. 7, б). Обмотки ![]() и
и ![]() смещены на статоре на половину полюсного
деления
смещены на статоре на половину полюсного
деления ![]() /2. Ротор управляемых
двигателей имеет большое активное сопротивление, так что точка
/2. Ротор управляемых
двигателей имеет большое активное сопротивление, так что точка ![]() находится за пределами рабочего участка
шкалы скольжения 0<s<1 (рис. 4, в).
Поэтому начальная линейная часть механической характеристики М(s) оказывается растянутой вплоть до s=1.
находится за пределами рабочего участка
шкалы скольжения 0<s<1 (рис. 4, в).
Поэтому начальная линейная часть механической характеристики М(s) оказывается растянутой вплоть до s=1.
При регулировании тока управления изменяется интенсивность
пульсирующего поля управления. При равенстве м.д.с. обмоток ![]() и
и ![]() обеспечивается полная компенсация обратных
волн магнитной индукции (рис. 8, а). По мере уменьшения тока управления
усиливается обратное поле, а вместе с ним и обратный момент (рис. 8, б).
Характеристика результирующего момента М(s)
смещается. При
обеспечивается полная компенсация обратных
волн магнитной индукции (рис. 8, а). По мере уменьшения тока управления
усиливается обратное поле, а вместе с ним и обратный момент (рис. 8, б).
Характеристика результирующего момента М(s)
смещается. При ![]() интенсивность прямого и
обратного полей одинакова, и пусковой момент
интенсивность прямого и
обратного полей одинакова, и пусковой момент ![]() (рис. 8, в). На рис. 9 построено семейство
характеристик М(s) и механических
характеристик
(рис. 8, в). На рис. 9 построено семейство
характеристик М(s) и механических
характеристик ![]() . Очевидно,
при заданном противодействующем моменте
. Очевидно,
при заданном противодействующем моменте ![]() изменением тока управления можно
регулировать скорость двигателя. В некоторых случаях скоростью двигателя
управляют путем изменения сдвига фаз токов
изменением тока управления можно
регулировать скорость двигателя. В некоторых случаях скоростью двигателя
управляют путем изменения сдвига фаз токов ![]() и
и ![]() . так же, как и описанном варианте
регулирования, при этом происходит изменение интенсивности прямого и обратного
полей.
. так же, как и описанном варианте
регулирования, при этом происходит изменение интенсивности прямого и обратного
полей.
В зависимости от требований быстродействия ротор изготавливают массивным из конструкционной стали, покрытой тонким слоем меди 2 (рис. 10 а), или полым, выполненным из тонкого алюминиевого листа (рис. 10, б). Во втором случае внутрь ротора вставлен второй статор 4, уменьшающий магнитное сопротивление.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.