тельно - линейным резистором Roи идеальной нелинейной катушкой i(y). Вебер-амперная характеристика магнитной цепи аппроксимирована уравнением iw=a·sh(b·Ф), а вольт-амперная характеристика катушки в режиме без подмагничивания - уравнением I=c·U+ d·U5. Коэффициенты уравнений аппроксимации заданы в табл. 27.1.
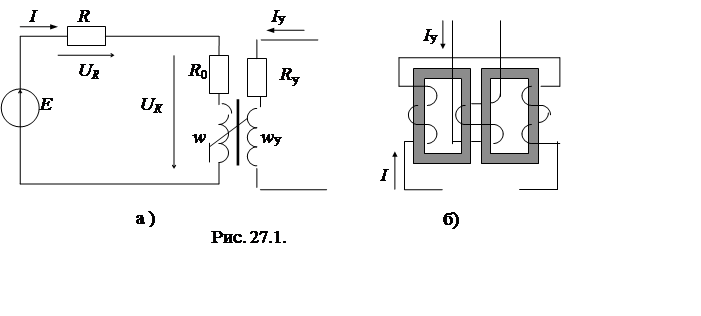
3. Рабочие схемы исследуемых цепей и схемы включения измерительных приборов (рис. 27.2 и 27.3).
 |
Т а б л и ц а 27.1
|
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Е, B |
40 |
45 |
50 |
45 |
50 |
55 |
50 |
55 |
60 |
45 |
|
R, Ом |
28 |
30 |
35 |
32 |
34 |
35 |
35 |
37 |
40 |
30 |
|
R0, Ом |
3 |
4 |
5 |
3 |
4 |
5 |
3 |
4 |
5 |
3 |
|
Iу, A |
0,43 |
0,51 |
0,38 |
0,52 |
0,42 |
0,55 |
0,47 |
0,36 |
0,44 |
0,52 |
Выводы |
0-3 |
0-4 |
0-5 |
0-3 |
0-4 |
0-5 |
0-3 |
0-4 |
0-5 |
0-3 |
|
c |
4,14 |
2,62 |
2,07 |
4,14 |
2,62 |
2,07 |
4,14 |
2,62 |
2,07 |
4,14 |
|
d |
1,18 |
0,58 |
0,29 |
1,18 |
0,58 |
0,29 |
1,18 |
0,58 |
0,29 |
1,18 |
|
w, вит |
210 |
240 |
270 |
210 |
240 |
270 |
210 |
240 |
270 |
210 |
|
wy, вит |
500 |
500 |
500 |
500 |
500 |
500 |
500 |
500 |
500 |
500 |
27.3. Теоретические сведения и методические указания
Управляемая нелинейная катушка содержит на общем магнитном сердечнике две обмотки - рабочую обмотку w, которая включается в рабочую цепь переменного тока, и обмотку управления wy, в которую подается от постороннего источника постоянный ток Iу. Под воздействием постоянной намагничивающей силы Iуwy процесс перемагничивания сердечника смещается в область магнитного насыщения. Это приводит к увеличению тока в рабочей обмотке, что эквивалентно уменьшению ее реактивного сопротивления. Таким образом осуществляется управление током рабочей обмотки посредством изменения тока в обмотке управления. Для устранения обратного влияния тока рабочей обмотки на цепь управления катушку конструктивно выполняют из двух одинаковых элементов (рис. 27.1б). Обмотки управления отдельных элементов включаются последовательно-встречно, благодаря чему переменные ЭДС, наводимые в них, направлены встречно и взаимно компенсируются.
При работе управляемой нелинейной катушки в качестве отдельного элемента сложной цепи ее режим будет определяться двумя факторами: а)напряжением (током) на ее зажимах и б)током управления Iу. Из этого следует, что для расчета режима в такой цепи управляемая нелинейная катушка должна быть представлена семейством вольт-амперных характеристик I(U) для различных значений тока управления Iу=const.
Семейство вольт-амперных характеристик нелинейной катушки в режиме подмагничивания постоянным током Iуполучается из расчетной вольтамперной характеристикибез подмагничивания путем ее параллельного смещения по оси I на расстояние DI=к·Iу(рис. 27.3) , где коэффициент к зависит от соотношения чисел витков катушек wy /w и от геометрических размеров магнитопровода.
Для цепи с последовательным соединением активного сопротивления
(нагрузки) R и
управляемой нелинейной катушки
UL=f(I,Iу) уравнение 2-го закона Кирхгофа имеет вид: E = UR + UL
- в
комплексной форме или ![]() - в
обычной форме. Учитывая, что UR
=I·R,
получим уравнение
эллипса с полуосями Eи E/R:
- в
обычной форме. Учитывая, что UR
=I·R,
получим уравнение
эллипса с полуосями Eи E/R:
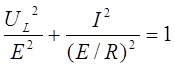 .
.
Для графического расчета режима схемы рис. 28.1 при заданной ЭДС источника Е и сопротивлении нагрузки R на графическую диаграмму семейства вольтамперных характеристик управляемой нелинейной катушки UL=f(I,Iу)наносится эллипс с полуосями Е и Е/R, точка пересечения которого с соответствующей характеристикой определяет рабочую точку катушки (рис. 27.3). Из диаграммы непосредственно следуют величины UL и I, а напряжение
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.