



УДК 62-83Ж681.51:382.3
Синтез и исследование микропроцессорных регуляторов в замкнутых системах с использованием Маtlab-Simulink: Методические указания к лабораторным работам Сост.: П.Н. Кунинин: СибГИУ; - Новокузнецк, 2003. – 35 с.
Освоение процессов синтеза аналоговых и цифровых регуляторов для управления непрерывными объектами, их взаимного преобразования и исследования регуляторов и систем на математических моделях с использованием среды Матlab-Simulink
Предназначено для студентов специальностей "Промышленная электроника" (200400) и "Электропривод и автоматика промышленных установок и технологических комплексов" (180400).
Рецензент - кафедра электротехники и электрооборудования Сибирского государственного индустриального университета (зав. кафедрой М.В. Кипервассер)
Печатается по решению редакционно-издательского совета университета.
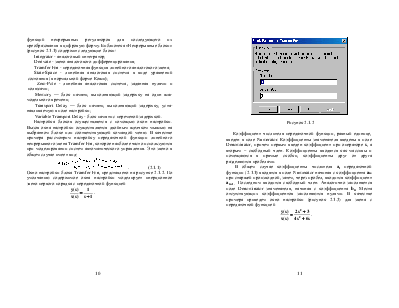
Предварительным этапом проектирования микропроцессорных систем является моделирование объекта управления и синтез цифрового регулятора, который может быть реализован в управляющем контроллере или промышленном компьютере. При моделировании достаточно синтезировать передаточную функцию, а при реализации в контроллере требуется разработка программы управления, включая и программную реализацию регулятора.
Средством разработки математических моделей дискретных регуляторов для аналоговых и дискретных объектов управления является интегрированные в MATLAB 6.0 пакеты расширения Simulink и Power System Blockset. Достоинством этих пакетов является то, что они достаточно простыми методами обеспечивают моделирование непрерывных и дискретных регуляторов для линейных и нелинейных систем, комбинировать аналоговую модель объекта управления с цифровым регулятором, преобразовывать одни формы моделей в другие.
Целью лабораторной работы является освоение проектирования аналоговых и цифровых регуляторов для управления непрерывными объектами, их взаимного преобразования и исследования регуляторов и систем на математических моделях. При исследовании учитывается, что реализация программы управления может быть обеспечена преобразованием аналоговой или дискретной передаточной функции в разностное уравнение, при чем во втором варианте, как правило, создаются более совершенные алгоритмы с большим шагом дискретизации и более точно соответствующие заданным характеристикам системы.
2. Настройка и краткое описание пакета Matlab-Simulink
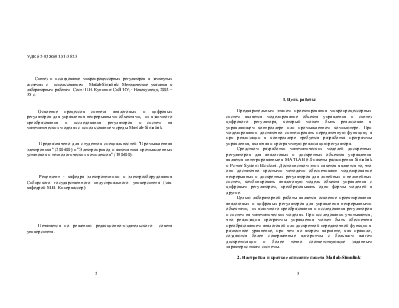
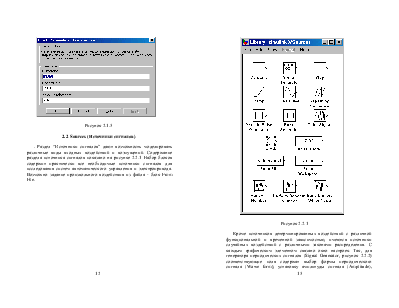
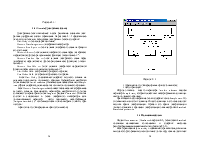
Система Matlab-Simulink включает в свой состав более двадцати пакетов расширения. Полный состав пакетов приведен в левой колонке окна Simulink Library Browser на рисунке 2.1.
 |
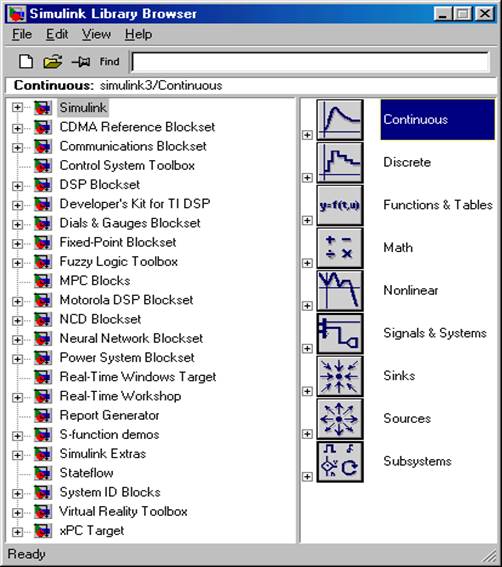
Рисунок 2.1
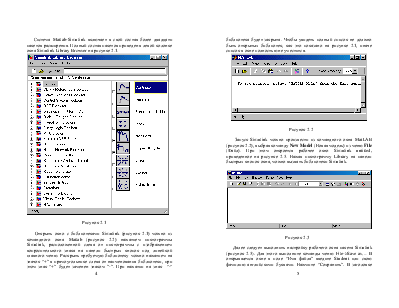
Открыть окно с библиотеками Simulink (рисунок 2.1) можно из командного окна Matlab (рисунок 2.2) нажатием пиктограммы Simulink, расположенной слева от пиктограммы с изображением вопросительного знака на панели быстрых кнопок под линейкой главного меню. Раскрыть требуемую библиотеку можно нажатием на значок “+” в прямоугольнике слева от наименования библиотеки, при этом знак “+” будет заменен знаком ”-”. При нажатии на знак “-“ библиотека будет закрыта. Чтобы увидеть полный список не должно быть открытых библиотек, как это показано на рисунке 2.1, иначе список в окне полностью не уместится.
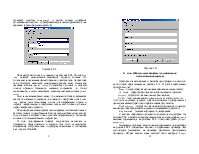
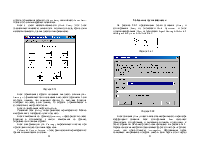
Рисунок 2.2
Запуск Simulink можно произвести из командного окна MatLAB (рисунок 2.2), выбрав команду NewModel (Новая модель) из менюFile (Файл). При этом откроется рабочее окно Simulink untitled, приведенное на рисунке 2.3. Нажав пиктограмму Library на панели быстрых кнопок окна, можно вызвать библиотеки Simulink.
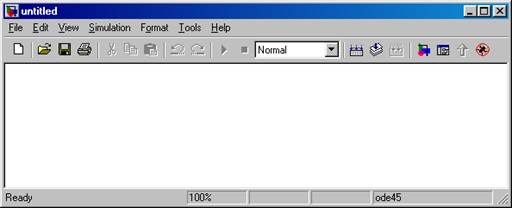
Рисунок 2.3
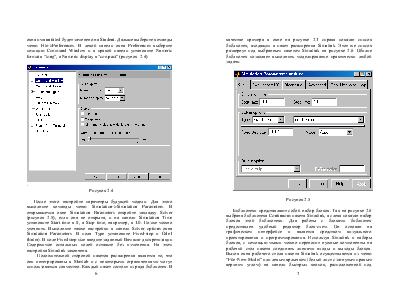
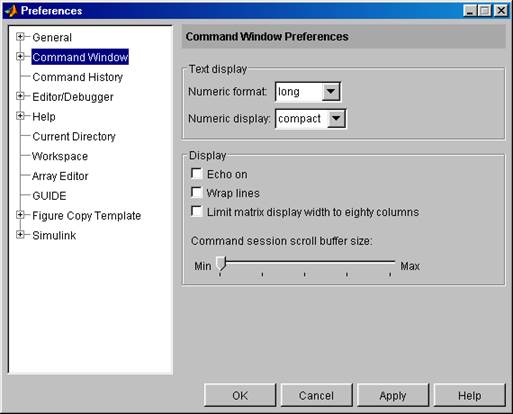
Далее следует выполнить настройку рабочего окна пакета Simulink (рисунок 2.3). Для этого выполните команды меню File->Save as… В открывшемся окне в поле “Имя файла” введите Student или свою фамилию английскими буквами. Нажмите “Cохранить”. В заголовке окна имя untitled будет заменено на Student. Дальше выберите команды меню File->Preferences. В левой панели окна Preferences выберите позицию Command Window и в правой панели установите Numeric format в “long”, а Numeric display в “compact” (рисунок 2.4)
 .
.
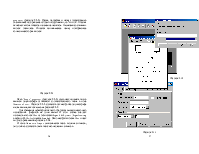
Рисунок 2.4
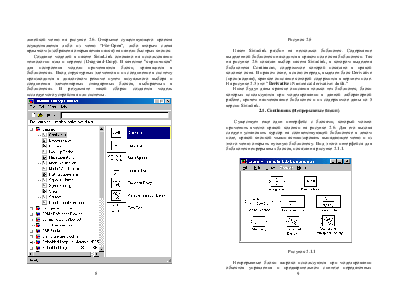
После этого настройте параметры будущей модели. Для этого выполните команды меню Simulation->Simulation Parameters. В открывшемся окне Simulation Parameters откройте закладку Solver (рисунок 2.5), если она не открыта, и на панели Simulation Time установите Start time в 0, а Stop time, например, в 1.0. Позже можно уточнить. Выполните также настройки в панели Solver options окна Simulation Parameters. В поля Type установите Fixed-step и Ode1 (Euler). В поле Fixed step size введите заданный Вам шаг дискретизации
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.