









Кафедра машин и технологии обработки металлов давлением
ПРОМЫШЛЕННЫЙ РОБОТ МП-9С
Методические указания к проведению лабораторной работы по дисциплине
"Автоматизация, робототехника и ГПС кузнечно-штамповочного производства"
для студентов специальности
"Машины и технология обработки металлов давлением"
(120400)
УДК 621.38(62)
П
Рецензент:
Кандидат технических наук,
П Промышленный робот МП-9С: Метод. указ./Сост.: Е.А. Новиков: ГОУ ВПО «СибГИУ». – Новокузнецк, 2003. – 17с., ил.
Изложено назначение, устройство и порядок эксплуатации промышленного робота МП-9С.
Цель работы: изучение конструкции робота, овладение навыками эксплуатации и обслуживания.
Работа предназначена для студентов специальности «Машины и технология обработки металлов давлением» (120400).
Содержание
Краткое описание манипуляционной системы робота МП-9С.. 4
Порядок выполнения работы.. 10
Отчёт о работе. 12
Контрольные вопросы.. 12
Техника безопасности. 12
Список литературы.. 13
Пневматический робот МП-9С предназначен для автоматизации технологических процессов в промышленности, преимущественно для обслуживания штамповочных прессов. Робот, оснащённый захватным устройством пневматического или механического типа, способен осуществлять захват, перенос и позиционирование детали в заданной точке рабочей зоны.
Грузоподъёмность - 0,2 кг
Число степеней подвижности - 3
Рабочая система координат - цилиндрическая
Максимальная величина перемещения
- механизма выдвижения - 180 мм
- механизма подъёма - 30 мм
- механизма подъёма - 120 град.
Тип привода - пневматический
Рабочее давление воздуха - 0,4-0,5 МПа
Тип системы управления - цикловая
Позиционирование - по механическим упорам
Число точек позиционирования по каждой степени подвижности - 2
Точность позиционирования - +/- 0,05 мм
Масса - 40 кг
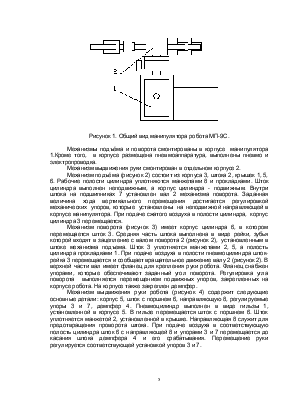
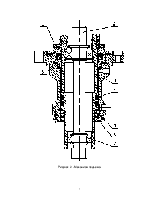
Общий вид манипулятора изображён на рисунке 1.
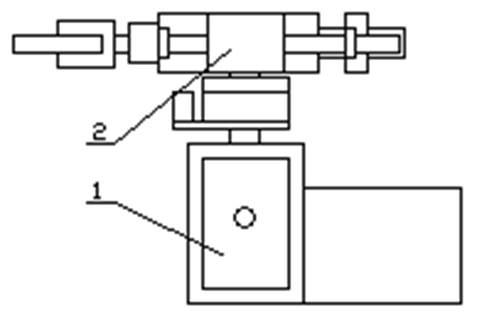
Рисунок 1. Общий вид манипулятора робота МП-9С.
Механизмы подъёма и поворота смонтированы в корпусе манипулятора 1.Кроме того, в корпусе размещена пневмоаппаратура, выполнены пневмо и электропроводка.
Механизм выдвижения руки смонтирован в отдельном корпусе 2.
Механизм подъёма (рисунок 2) состоит из корпуса 3, штока 2, крышек 1, 5, 6. Рабочие полости цилиндра уплотняются манжетами 8 и прокладками. Шток цилиндра выполнен неподвижным, а корпус цилиндра - подвижным. Внутри штока на подшипниках 7 установлен вал 2 механизма поворота. Заданная величина хода вертикального перемещения достигается регулировкой механических упоров, которые установлены на неподвижной направляющей в корпусе манипулятора. При подаче сжатого воздуха в полости цилиндра, корпус цилиндра 3 перемещается.
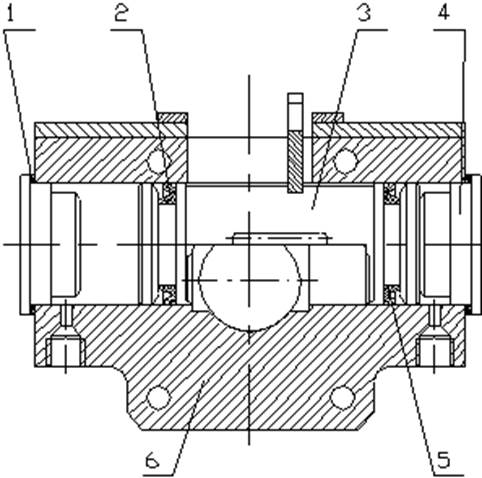
Механизм поворота (рисунок 3) имеет корпус цилиндра 6, в котором перемещается шток 3. Средняя часть штока выполнена в виде рейки, зубья которой входят в зацепление с валом поворота 2 (рисунок 2), установленным в штоке механизма подъема. Шток 3 уплотняется манжетами 2, 5, а полость цилиндра прокладками 1. При подаче воздуха в полости пневмоцилиндра шток-рейка 3 перемещается и сообщает вращательное движение валу 2 (рисунок 2). В верхней части вал имеет фланец для крепления руки робота. Фланец снабжен упорами, которые обеспечивают заданный угол поворота. Регулировка угла поворота выполняется перемещением подвижных упоров, закрепленных на корпусе робота. На корпусе также закреплен демпфер.
Механизм выдвижения руки робота (рисунок 4) содержит следующие основные детали: корпус 5, шток с поршнем 6, направляющую 8, регулируемые упоры 3 и 7, демпфер 4. Пневмоцилиндр выполнен в виде гильзы 1, установленной в корпусе 5. В гильзе перемещается шток с поршнем 6. Шток уплотняется манжетой 2, установленной в крышке. Направляющая 8 служит для предотвращения проворота штока. При подаче воздуха в соответствующую полость цилиндра шток 6 с направляющей 8 и упорами 3 и 7 перемещается до касания штока демпфера 4 и его срабатывания. Перемещение руки регулируется соответствующей установкой упоров 3 и 7.
Механизм захватного устройства (ЗУ) в качестве двигателя имеет линейный пневмоцилиндр одностороннего действия. При подаче воздуха в полость ци-
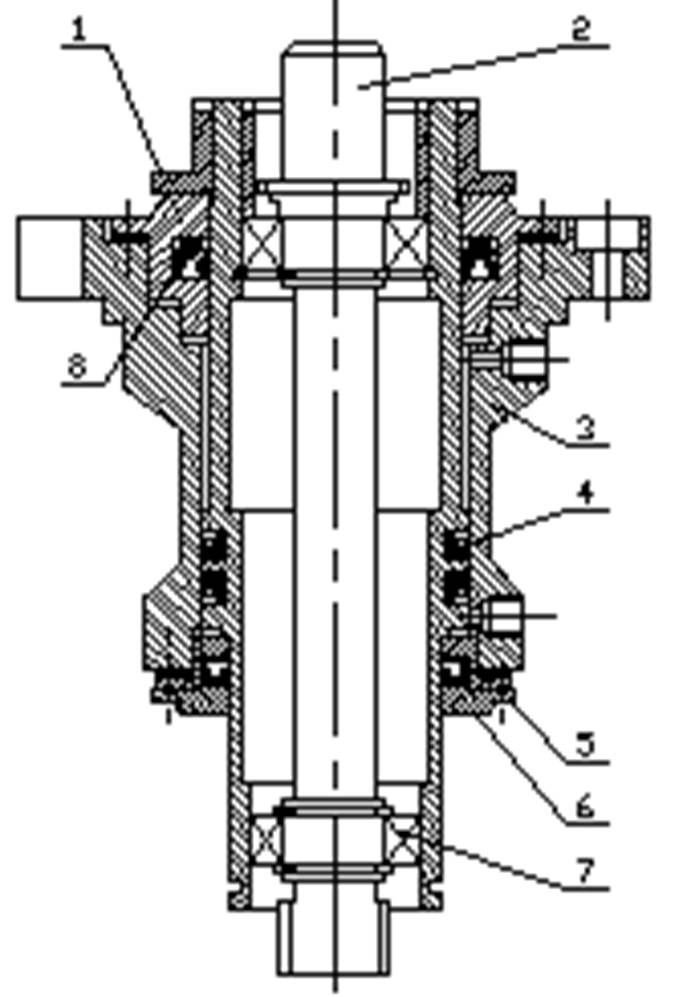
Рисунок 2. - Механизм подъема.
линдра (рисунок 5) поршень перемещается, при этом клиновыми поверхностями действует на рычаги ЗУ, сжимая его. При снятии давления воздуха поршень возвращается назад под действием возвратной пружины. При этом рычаги ЗУ разжимаются под действием пружины рычагов.
Привод робота (рисунок 6) имеет функциональные блоки:
· блок подготовки сжатого воздуха;
· блок распределения сжатого воздуха:
· система передачи сжатого воздуха между устройствами привода.
Из магистрали сжатый воздух через входной штуцер 1 и запорный вентиль 2 попадает в блок подготовки, имеющий в составе влагоотделитель 3, регулятор давления 4, манометр 5 и маслораспылитель 6. Во влагоотделителе из воздуха удаляется влага. Регулятор давления понижает давление воздуха до требуемой
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.