 , а в случае отсутствия
нагрузки имеем
, а в случае отсутствия
нагрузки имеем  . Интегрирование приведенных
выражений дает формулы для вычисления времени торможения. При торможении до
любого значения скорости, например до ω1 , время вычисляется по
выражению
. Интегрирование приведенных
выражений дает формулы для вычисления времени торможения. При торможении до
любого значения скорости, например до ω1 , время вычисляется по
выражению
 , а в случае торможения до
полной остановки, т. е. до ω1=0, по выражению
, а в случае торможения до
полной остановки, т. е. до ω1=0, по выражению
 .
.
Оценим эффективность динамического торможения, т. е. оценим изменение значения замедления (интенсивность замедления), анализом характеристик, приведенных на рис. . Он показывает, что в зависимости от сопротивления торможения Rторм характеристики динамического торможения имеют различный наклон и это позволяет получать в момент перехода на режим торможения различное значение момента торможения. Чем больше сопротивление динамического торможения (Rторм.2 > Rторм.1), тем меньше момент динамического торможения (Мдин.1 > Мдин.2). По мере снижения скорости значение момента торможения уменьшается (Мi), а следовательно, уменьшается интенсивность торможения. При работе электропривода с активным моментом нагрузки процесс динамического торможении не оканчивается при скорости равной нулю. Активный момент заставляет якорь двигателя поменять направление вращения и разогнаться до скорости, при которой Мдв.т =Мст. На рис. это до скорости –ωкон.1 при Rторм.1 и до скорости –ωкон.2 при Rторм.2. Поэтому в такого типа электроприводах при использовании динамического торможения для окончательной остановки необходимо предусмотреть отключение электропривода при достижении скоростью нулевого значения.
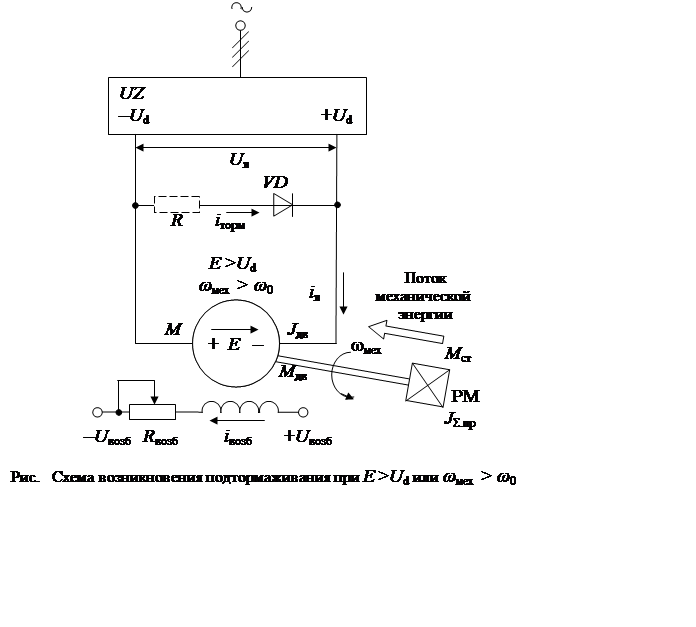
В электроприводах с управляемыми полупроводниковыми выпрямителями для создания подтормаживающего эффекта в процессе торможения за счет уменьшения питающего двигатель напряжения, когда ЭДС двигателя становится больше напряжения Ud на выходе выпрямителя, вводится в действие диод с возможно включенным последовательно ему сопротивлением, создающие контур для тока торможения, рис. .
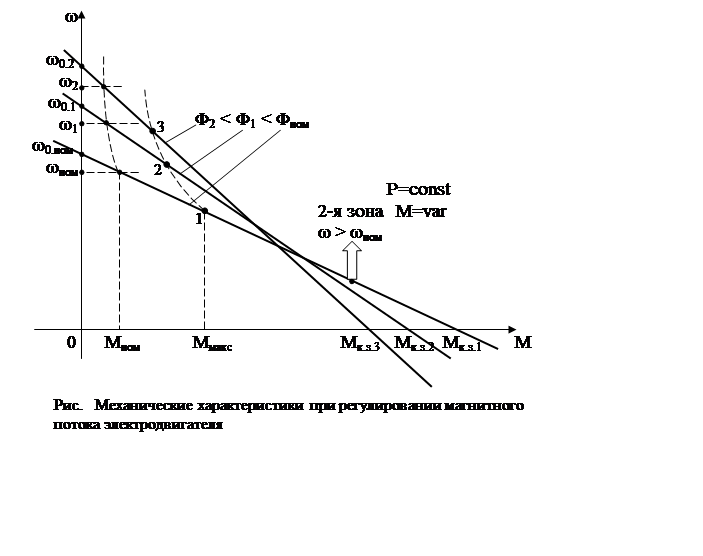
Искусственные механические характеристики другого свойства можно получить, использую второй канал управления двигателем постоянного тока, а именно, изменение магнитного потока машины (тока возбуждения). В связи с тем, что рабочая точка состояния магнитной цепи двигателя выбирается в так называемом колене его кривой
 |
 .
Механические характеристики при таком управлении приведены на рис. .
Диапазон регулирования скорости рассматриваемым способом небольшой D ≤ 3…4. Это объясняется тем, что предел увеличения скорости
ограничивается механической прочностью узлов двигателя. Для двигателя
постоянного тока максимальная скорость не превышает 4000 об/мин. Рабочий
участок характеристик (ω0.ном – 1, ω0.1– 2, ω0.2 –
3) ограничивается перегрузочной способностью двигателя, которая уменьшается в
силу уменьшения магнитного потока (Мдв = к · Ф · iЯ), рис. .
.
Механические характеристики при таком управлении приведены на рис. .
Диапазон регулирования скорости рассматриваемым способом небольшой D ≤ 3…4. Это объясняется тем, что предел увеличения скорости
ограничивается механической прочностью узлов двигателя. Для двигателя
постоянного тока максимальная скорость не превышает 4000 об/мин. Рабочий
участок характеристик (ω0.ном – 1, ω0.1– 2, ω0.2 –
3) ограничивается перегрузочной способностью двигателя, которая уменьшается в
силу уменьшения магнитного потока (Мдв = к · Ф · iЯ), рис. .
Способ регулирования за счет изменения добавочного сопротивления в якорной цепи двигателя в настоящее время мало используется из-за низкого качества регулировочных, пусковых и тормозных характеристик, больших технико-экономических затрат.
 |
Вернемся к приведенным в начале уравнениям, описывающим работу двигателя, записав их в операторной форме
 ,
,
![]() .
.
где Тв=Lв/Rв – электромагнитная постоянная времени обмотки возбуждения, Тя=Lя/Rя – электромагнитная постоянная времени обмотки якоря, кф=Ф/iв – коэффициент, соответствующий линейной части кривой намагничивания двигателя. На основании записанных уравнений можно составить структурную схему электропривода постоянного тока независимого возбуждения, рис. . При работе двигателя с номинальным потоком (Ф = Фном = const) структурная схема электропривода, поскольку имеем (1 + Тя·р)·М=β·(ω0 – ω), будет выглядеть как апериодическое звено первого порядка, рис. .
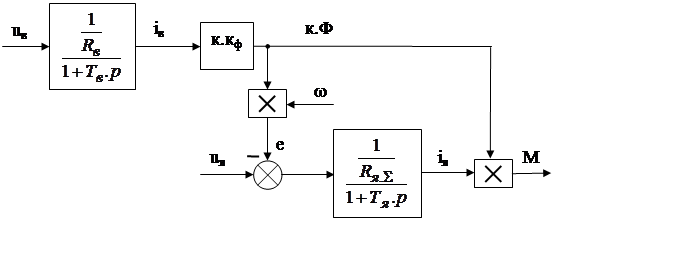
Рис.
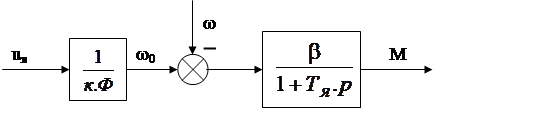
Рис.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.