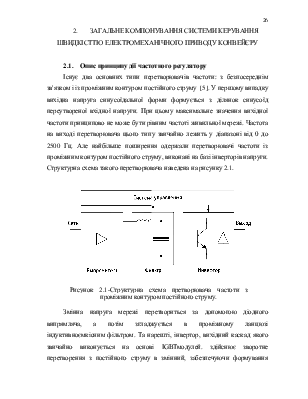
собою послідовність імпульсів напруги постійної амплітуди й тривалості, що змінюється, що на індуктивному навантаженні, якийсь є обмотка статора, формує струми синусоїдальної форми (рис. 2.2).
Рисунок 2.2- Вихідний сигнал перетворювача чистоти
Можливий діапазон регулювання частоти - від 0 до декількох тисяч герців.
Типи навантажень
Вимоги до електропривода визначаються діапазоном необхідних швидкостей і типом навантаження. Залежність між швидкістю обертання й моментом опору лінійна й однакова у всьому діапазоні (рис. 2.3).
Рисунок2.3- Механічні характеристика навантаження конвеєра
Залежно від характеру навантаження перетворювач частоти забезпечує різні режими керування електродвигуном, реалізуючи ту або іншу залежність між швидкістю обертання електродвигуна й вихідною напругою.
Режим з лінійною залежністю між напругою й частотою (U/f=const) реалізується найпростішими перетворювачами частоти для забезпечення постійного моменту навантаження й використовується для керування синхронними двигунами або двигунами, підключеними паралельно. Разом з тим при зменшенні частоти, починаючи з деякого значення, максимальний момент двигуна починає падати. Для підвищення моменту на низьких частотах у перетворювачах передбачається функція підвищення початкового значення вихідної напруги, що використовується для компенсації падіння моменту для навантажень із постійним моментом або збільшення початкового моменту для навантажень із високим пусковим моментом. Для регулювання електроприводів насосів і вентиляторів використовується квадратична залежність напруга/частота (U/f2 = const). Цей режим, так само як і попередній, можна використовувати для керування паралельно підключеними двигунами.
Перераховані режими керування достатні для більшості застосувань. Разом з тим для підвищення якості керування приводом потрібне використання інших, більше зроблених методів керування. До них ставляться метод керування потокосчепленням (Flux Current Control - FCC) і метод безсенсорного векторного керування (Sensorless Vector Control - SVC). Обидва методи базуються на використанні адаптивної моделі електродвигуна, що будується за допомогою спеціалізованого обчислювального пристрою, що входить до складу системи керування перетворювача.
Найбільш точне й ефективне керування забезпечує режим векторного керування без датчика зворотного зв'язку по швидкості (SVC). Якщо у двигунах постійного струму є дві обмотки (статорна, або порушення й роторна, або якірна), що дозволяє управляти роздільно швидкістю
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.