С выхода синхронного детектора углового дискриминатора снимаются видеоимпульсы, амплитуда которых пропорциональна угловому рассогласованию, а полярность указывает сторону уклонения цели от опорного направления. Для образования непрерывного управляющего напряжения эти импульсы сначала растягиваются на весь период повторения в пиковом детекторе, имеющем малую постоянную времени в цепи заряда и большую в цепи разряда. Полученное таким образом постоянное напряжение затем усиливается в электронном усилителе и поступает на обмотки электродвигателей привода антенны. В управляющий сигнал замешивается напряжение обратной связи, имеющее соответствующий закон и пропорциональное скорости вращения электродвигателя. Если двигатель вращается в сторону уменьшения рассогласования, управляющее напряжение оказывается меньше напряжения рассогласования, если в обратную сторону – больше, чтобы преодолеть инерцию двигателя.
В установившемся режиме РЛС непрерывно и точно следит за целью опорным направлением. Так как в РЛС применяется два канала, направление на цель отслеживается по обеим угловым координатам. Информация считывается с позиционных считывателей об углах положения цели и информация, принятая с зонда, поступает в вычислительное устройство, которое расшифровывает и преобразует её в напряжение управления ИКО для вывода информации на экран.
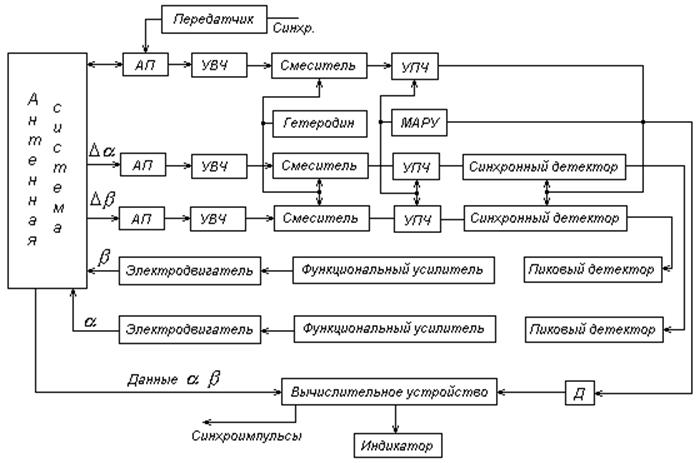
Рис.3. Структурная схема РЛС
13. Сводная таблица технических характеристик РЛС
Параметр |
Величина |
Единицы измерения |
|
Дальность действия |
525 |
км |
|
Разрешение по дальности |
118.5 |
м |
|
Разрешение по азимуту |
1 |
град. |
|
Разрешение по углу места |
1 |
град. |
|
Максимальная высота до которой РЛС сопровождает шар-зонд |
20 |
км |
|
Чувствительность приёмника |
7,71×10-13 |
Вт |
|
Полоса пропускания приёмника |
18 |
МГц |
|
Мощность передатчика (импульсная) |
2,19 |
кВт |
|
Мощность передатчика (средняя) |
0,23 |
Вт |
|
Динамический диапазон входных сигналов |
125 |
дБ |
|
КНД антенны |
45 |
дБ |
|
Длительность зондирующего импульса |
0,75 |
мкс |
|
Частота следования импульсов |
250 |
Гц |
|
Несущая частота |
9.375 |
ГГц |
|
Отношение сигнал-шум (q) |
20 |
|
|
Коэффициент различимости |
13,97 |
дБ |
14. Список литературы
1. «Основы радиолокации» Финкельштейн М. И. – М. : Радио и связь, 1975.
2. «Теоретические основы радиолокации» / Под ред. Я.Д. Ширмана. М.: Сов. Радио, 1970 год.
3. «Справочник по радиолокации» / Под ред. М. Сколкина. – М.: Сов. Радио, 1978 год – т.4.
4. «Теоретические основы радиолокации» / Под ред. В.Е. Дулевича. М.: Сов. Радио, 1978 год.
5. «Теоретические основы радиолокации» / Под ред. Казаринова. М.: Сов. Радио.
Содержание
1. Задание на проектируемую систему
2. Введение
3. Анализ технического задания
4. Выбор оптимальной рабочей длины волны РТС и параметров сигнала
5. Выбор и обоснование методов измерения координат с требуемой точностью и разрешающей способностью
5.1 Расчет разрешающей способности по дальности
5.1.1 Расчет погрешности измерения дальности
5.2 Расчет разрешающей способности и погрешности измерения по азимуту и углу места
6. Выбор типа АФУ
7. Параметры приёмника
8. Параметры передатчика
9. Выбор метода генерации зондирующего сигнала и метода обработки принятых сигналов
9.1 Генерация зондирующего сигнала
9.2 Расчет коэффициента различимости
10.Энергетический расчет РТС
11.Расчет динамического диапазона входных сигналов и выбор структуры приемника
12.Описание функциональной схемы разработанной РТС
13.Сводная таблица технических характеристик РЛС
14.Список литературы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.