Рисунок 3 – Структурная схема РЛС с синтезированием апертуры
Основным
узлом РЛС является когерентная приёмо-передающая система. Фазовая стабильность
обеспечивается стабильным задающим генератором с частотой ![]() . Напряжение с выхода этого генератора
усиливается в генераторе высокой частоты (ГВЧ), который может состоять из
одного или нескольких клистронных усилителей. Для формирования сигнала,
подаваемого на смеситель 2 (СМ2), в смесителе 1 (СМ1)
преобразуются колебания стабильного генератора, а также гетеродина
промежуточной частоты
. Напряжение с выхода этого генератора
усиливается в генераторе высокой частоты (ГВЧ), который может состоять из
одного или нескольких клистронных усилителей. Для формирования сигнала,
подаваемого на смеситель 2 (СМ2), в смесителе 1 (СМ1)
преобразуются колебания стабильного генератора, а также гетеродина
промежуточной частоты ![]() . Фильтр выделяет одну боковую
составляющую с частотой
. Фильтр выделяет одну боковую
составляющую с частотой ![]() . Эта составляющая и
служит гетеродинным сигналом для СМ2. Модулятор формирует импульсы.
На выходе СМ2 при приёме сигналов вырабатывается напряжение
промежуточной частоты
. Эта составляющая и
служит гетеродинным сигналом для СМ2. Модулятор формирует импульсы.
На выходе СМ2 при приёме сигналов вырабатывается напряжение
промежуточной частоты ![]() , которое несёт полезную фазовую
информацию
, которое несёт полезную фазовую
информацию ![]() о цели. Эта информация выделяется
когерентным детектором.
о цели. Эта информация выделяется
когерентным детектором.
Электронное устройство обработки включает в себя: ЗУ, устройство обработки сигналов.
Запоминающее устройство (ЗУ) обеспечивает довольно длительное хранение (до нескольких секунд) большого объёма информации, имеет высокую разрешающую способность и является многоканальным.
В качестве запоминающего устройства применяется цифровая запись на магнитном носителе.
Когда в РЛС с синтезированием сигналов необходимо иметь выходные сигналы в реальном масштабе времени, можно применить фильтровую обработку сигналов (доплеровко-фильтровой метод обработки сигналов).
Суть фильтрового метода повышения разрешающей способности РЛС состоит в том, что из всей совокупности сигналов, попадающих в пределы луча антенны при полёте самолёта, выделяются только те, которые имеют определённую величину доплеровской частоты.
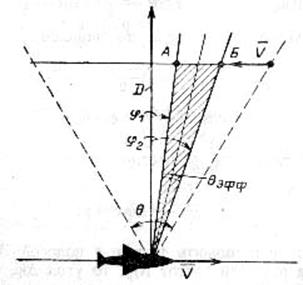
Рисунок 4 – Доплеровский метод повышения разрешающей способности по угловым координатам
РЛС с синтезированными антеннами очень чувствительна к фазовым нестабильностям сигналов. Такие фазовые нестабильности и ошибки могут быть вызваны условиями распространения в атмосфере, колебаниями самолёта на траектории, нестабильностью частоты в РЛС или неточностями в системе обработки. При этом выходной сигнал расширяется, положение его максимума смешается от истинного значения, увеличивается уровень боковых лепестков. Всё это существенно ухудшает результаты обработки.
Для уменьшения фазовых изменений из-за флуктуаций траектории полёта самолёта могут использоваться инерциальные системы навигации. Акселерометрические датчики позволяет измерить эти смещения, и соответствующие фазовые поправки могут быть введены в принимаемые сигналы, компенсируя возникшие ошибки. Кроме того, антенна РЛС должна быть стабилизирована по направлению. Сигналы стабилизации поступают от доплеровских систем измерения угла сноса и путевой скорости.
1. “Теоретические основы радиолокации” под редакцией Дулевича В.Е М-78г.
2. “Основы радиолокации” Финкельштейн М.И. М-83г.
3. “Справочник по радиолокации” Васин В.В. М-77г.
4. “Справочник по радиолокации” под редакцией Сколника М-77г.
5. Лекции “Основы радиолокации” Молчанов А.Н. Н-2000
6. “Радиолокационные устройства” под редакцией Григорина-Рябова В.В. М-1970г.
7. “Справочник по основам радиолокационной техники” под редакцией Дружинина В.В. М-1967г.
8. “Проектирование антенно - фидерных устройств” Жук М.С., Молчков Ю.Б. М-1966г.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.