В качестве
временного дискриминатора можно использовать генератор счетных импульсов и
счетчик, в который перед началом счета вводится число ![]() . С поступлением
запросного импульса счетчик подсчитывает с дискретностью
. С поступлением
запросного импульса счетчик подсчитывает с дискретностью ![]() время запаздывания ответного импульса, с
приходом которого счет прекращается. На выходе счетчика число
время запаздывания ответного импульса, с
приходом которого счет прекращается. На выходе счетчика число ![]() пропорционально рассогласованию. На
экстраполятор поступает усредненное значение
пропорционально рассогласованию. На
экстраполятор поступает усредненное значение ![]() для 125 импульсов. Его можно сформировать,
например, с помощью регистра, хранящего 128 чисел. Экстраполятор может быть
выполнен в виде сумматора, в котором вновь вводимое число
для 125 импульсов. Его можно сформировать,
например, с помощью регистра, хранящего 128 чисел. Экстраполятор может быть
выполнен в виде сумматора, в котором вновь вводимое число ![]() суммируется с ранее записанным NR. Положительное число записывается в прямом коде,
отрицательное – в дополнительном
суммируется с ранее записанным NR. Положительное число записывается в прямом коде,
отрицательное – в дополнительном ![]() .
.
Схема СЗ подобна схеме ВД с той
разницей, что в момент, когда показания счетчика станут равными NR формируется СИ, отстоящий от запросного импульса на
время ![]() . При этом счет прекращается и возобновляется с приходом следующего
запросного импульса.
. При этом счет прекращается и возобновляется с приходом следующего
запросного импульса.
Быстродействие применяемых устройств определяется допустимой ошибкой измерения дальности. Ошибка, обусловленная дискретностью отсчета, составляет:
 (7.2)
(7.2)
где ![]() — цена единицы измерения дальности,
— цена единицы измерения дальности,
![]() — период счетных импульсов.
— период счетных импульсов.
Ошибкой ![]() можно пренебречь, если она в 3 раза меньше
суммарного значения остальных составляющих. В данном случае допустимо
можно пренебречь, если она в 3 раза меньше
суммарного значения остальных составляющих. В данном случае допустимо ![]() , тогда
, тогда ![]() .
.
![]()

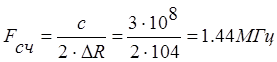 (7.3)
(7.3)
т.е. рабочая частота, определяющая быстродействие цифровых устройств.
Максимальное значение NR равно:
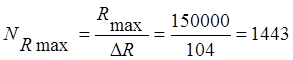 (7.4)
(7.4)
Т.е. устройства СИД должны быть 11-разрядными.
7.3 Амплитудный моноимпульсный пеленгатор.
Функциональная схема моноимпульсного пеленгатора приведена в приложении 3.
Антенна РЛС является облучаемой ФАР. Облучатель реагирует на любое боковое смещение цели относительно максимума ДН. Если максимум ДН совпадает с направлением на цель, на каждый из 4-х рупоров облучателя попадает одинаковое количество энергии. При отклонении цели равенство энергий упрощается. Отклонение регистрируется путем сравнения ответного сигнала для каждой пары рупоров с помощью СВЧ суммарно-разностных мостов. Разностные сигналы возрастают по амплитуде по мере отклонения цели от направления максимума ДН. При переходе через это направление их фаза меняется на 1800. Суммарный сигнал всех 4-х рупоров используется как опорный в синхронных детекторах угловой ошибки, позволяющих использовать изменение фазы для определения направления отклонения цели. Суммарный сигнал также используется для АРУ приемника.
В приемнике суммарный и разностные сигналы преобразуются в сигналы промежуточной частоты с помощью одного гетеродина для сохранения фазовых соотношений. Выходной суммарный сигнал детектируется и используется в качестве входного видео сигнала схемы (СИД). В СИД вырабатываются стробирующие импульсы, отпирающие схему измерения угловых координат только на время ожидаемого прихода ответного сигнала, что сделано в целях помехозащиты.
Мгновенная АРУ (МАРУ) поддерживает постоянство уровня сигнала рассогласования при большом динамическом диапазоне ответного сигнала, для получения устойчивого сопровождения по угловым координатам. МАРУ отслеживает изменение амплитуды каждого импульса. Для этого каскады УПЧ, подвергающиеся МАРУ, должны иметь логарифмическую амплитудную характеристику (рис.6).
Рис.6. Амплитудная характеристика МАРУ.
Приемник имеет два разностных канала, для измерения азимута и угла места. Из разностных сигналов в синхронных детекторах вырабатываются сигналы рассогласования при сопровождении по угловым координатам. Их амплитуда пропорциональна угловой ошибке, а полярность соответствует ее знаку. В каждом канале происходит накопление импульсов на накопительном конденсаторе. Постоянная времени его разряда такая, что он накапливает последние 125 импульсов. После аналого-цифрового преобразования получается усредненное значение сигнала рассогласования, в цифровом коде.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.