Лабораторная работа №4
Токоограничение в замкнутых системах управления электроприводом.
Цель: Настроить систему регулирования скорости с отсечкой по току.
Краткая теория.
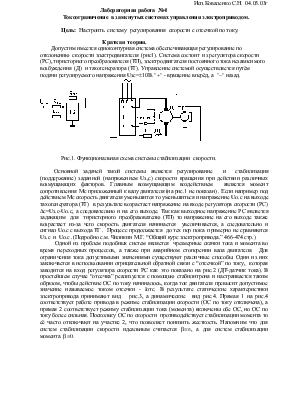
Допустим имеется одноконтурная система обеспечивающая регулирование по отклонению скорости электродвигателя (рис1). Система состоит из регулятора скорости (РС), тиристорного преобразователя (ТП), электродвигателя постоянного тока независимого возбуждения (Д) и тахогенератора (ТГ). Управление системой осуществляется путём подачи регулируемого напряжения Uзс=±10В. "+" - вращение вперёд, а "-" назад.
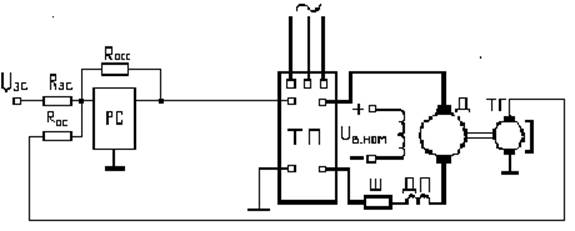 |
Рис.1. Функциональная схема системы стабилизации скорости.
Основной задачей такой системы является регулирование и стабилизация (поддержание) заданной (напряжением Uз,с) скорости вращения при действии различных возмущающих факторов. Главным возмущающим воздействием является момент сопротивления Мс приложенный к валу двигателя (на рис.1 не показан) . Если например под действием Мс скорость двигателя уменьшится то уменьшиться и напряжение Uо.с на выходе тахогенератора (ТГ) в результате возрастает напряжение на входе регулятора скорости (РС) Dс=Uз.с-Uо.с, а следовательно и на его выходе. Так как выходное напряжение РС является задающим для тиристорного преобразователю (ТП) то напряжение на его выходе также возрастает из-за чего скорость двигателя начинается увеличивается, а следовательно и сигнал Uо.с с выхода ТГ . Процесс продолжается до тех пор пока примерно не сравняются Uз.с и Uо.с .(Подробно с.м. Чиликин М.Г. “Общий курс электропривода.” 466-474 стр.)
Одной из проблем подобных систем является чрезмерные скачки тока и момента во время переходных процессов, а также при аварийном стопорении вала двигателя. Для ограничения тока допустимыми значениями существуют различные способы. Один из них заключается в использовании отрицательной обратной связи с “отсечкой” по току, которая заводится на вход регулятора скорости РС как это показано на рис.2 (ДТ-датчик тока). В простейшем случае “отсечка” реализуется с помощью стабилитрона и настраивается таким образом, чтобы действие ОС по току начиналось, когда ток двигателя превысит допустимое значение называемое током отсечки - Iотс. В результате статические характеристики электропривода принимают вид рис.3, а динамические вид рис.4. Прямая 1 на рис.4 соответствует работе привода в режиме стабилизации скорости (ОС по току отключена), а прямая 2 соответствует режиму стабилизации тока (момента) включены обе ОС, но ОС по току более сильная. Поскольку ОС по скорости противодействует стабилизации момента то её часто отключают на участке 2, что позволяет понизить жесткость. Напомним что для систем стабилизации скорости идеальным считается b=¥, а для систем стабилизации момента b=0.
Из уравнения движения Мд - Мс=Je следует, что при уменьшении пускового момента двигателя (Мд), ускорение (e) будет уменьшаться , а следовательно время переходного процесса будет увеличиваться, что является платой за ограничение тока.
Задание.
Необходимо методом последовательной коррекции настроить систему (рис.2) на технически оптимальный переходный процесс (ТО), а также настроить
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.