


САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ФАКУЛЬТЕТ ТЕХНИЧЕСКОЙ КИБЕРНЕТИКИ
КАФЕДРА АВТОМАТИКИ И ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ
по лабораторной работе №1
Моделирование объектов систем компьютерного управления; сбор и фиксация результатов моделирования.
Работу выполнили студенты гр 4081/2 Денисов А.С.
Хабаров М.А.
Преподаватель Нестеров С.А.
подпись ФИО
Санкт-Петербург
2008г.
1. Цель работы
– Изучение методики моделирования непрерывных объектов на аналоговом вычислительном комплексе.
– Знакомство с организацией системы сбора информации на базе платы сопряжения L-154 и персонального компьютера.
– Оценка точности моделирования объектов управления средствами аналоговой вычислительной техники.
2. Методика моделирования
Методика строится на использовании основных положений теории математического подобия, позволяющей установить подобие физических процессов в аналоговой модели и объекте. При этом процессы в объекте описываются соответствующими математическими зависимостями.
Программирование решения этих зависимостей на АВК заключается в создании схем, состоящих из ОУ и вспомогательных элементов так, чтобы физические процесс в них описывались математическими зависимостями, подобными исходным.
Программирование решения проводится в два этапа:
3. Схема набора и расчет ее параметров
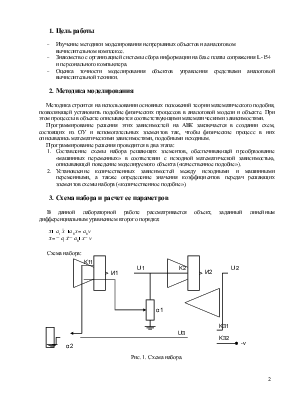
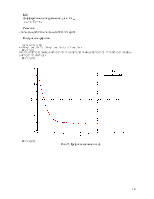
В данной лабораторной работе рассматривается объект, заданный линейным дифференциальным уравнением второго порядка:
![]()
![]()
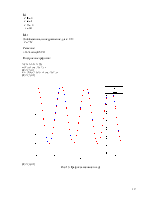
Схема набора:
Рис. 1. Схема набора.
Значения машинных переменных на выходах решающих элементов:
![]()
![]()
![]()
![]()
![]()
Подставим U1 и U2 в первое уравнение (K31 = K32 = K3):
![]()
Сравнивая машинное уравнение с исходным получим:
![]()
![]()
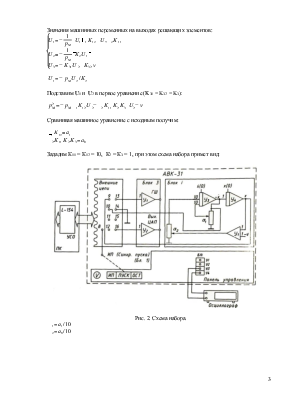
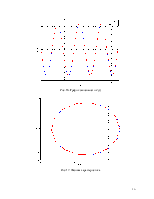
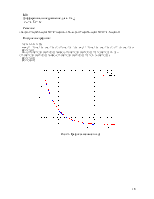
Зададим К11 = К12 = 10, К2 = К3 = 1, при этом схема набора примет вид:
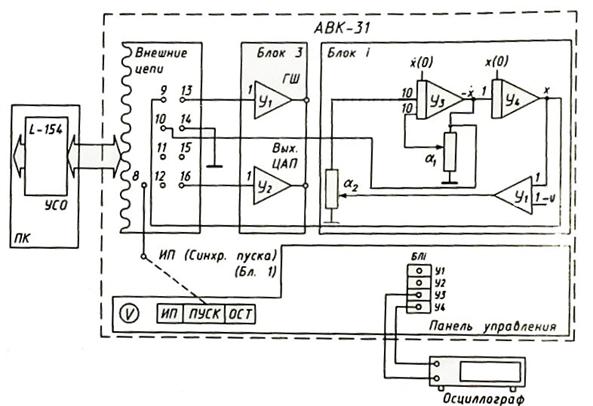
Рис. 2. Схема набора.
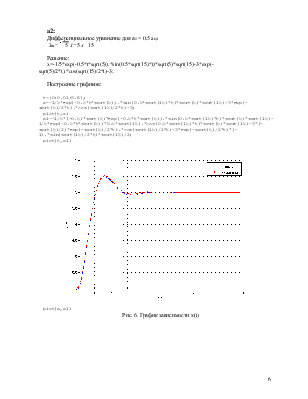
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.