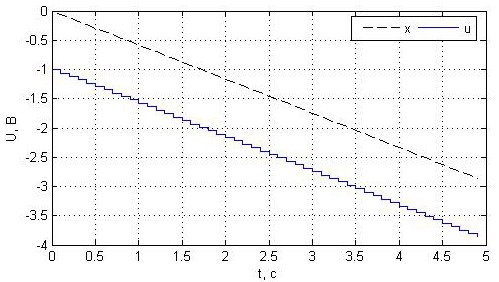
Рис. 4.1.3. Управление на границе устойчивости: КП = -1, КИД = 0.
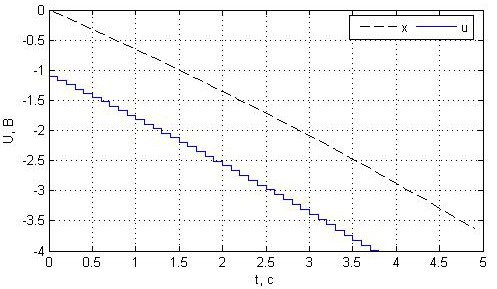
Рис. 4.1.4. Управление вне пределов области устойчивости: КП = -1,1, КИД = 0.
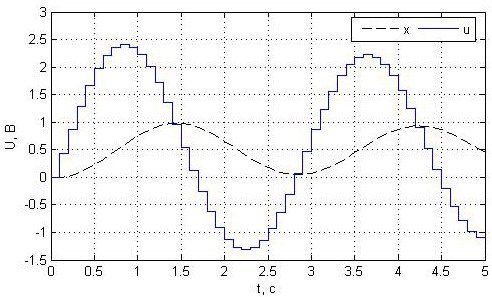
Рис. 4.1.5. Управление в пределах области устойчивости: КП = 0, КИД = 0,87.
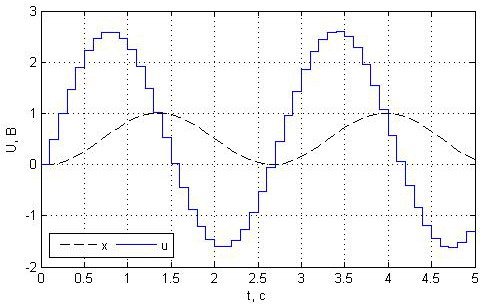
Рис. 4.1.6. Управление на границе устойчивости: КП = 0, КИД = 1.
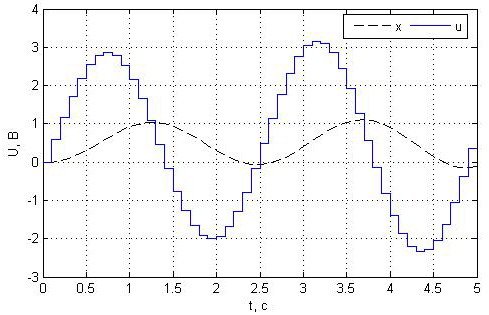
Рис. 4.1.7. Управление вне пределов области устойчивости: КП = 0, КИД = 1,17.
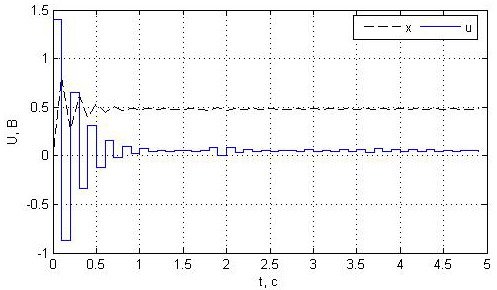
Рис. 4.1.8. Управление в пределах области устойчивости: КП = 28, КИД = 0.
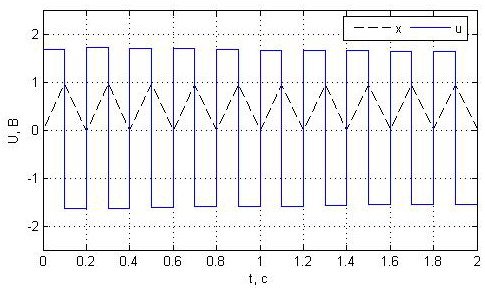
Рис. 4.1.9. Управление на границе устойчивости: КП = 34, КИД = 0.
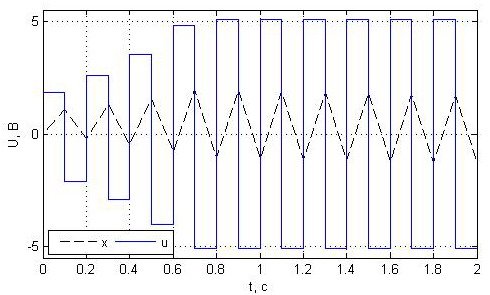
Рис. 4.1.10. Управление вне пределов области устойчивости: КП = 27, КИД = 0.
4.2. Т0=1с
Условия устойчивости:
![]() > 0
> 0
![]()
![]()
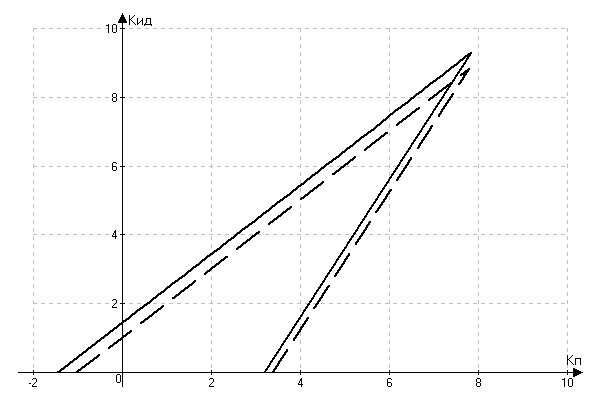
Рис. 4.2.1. Область устойчивости регулятора.
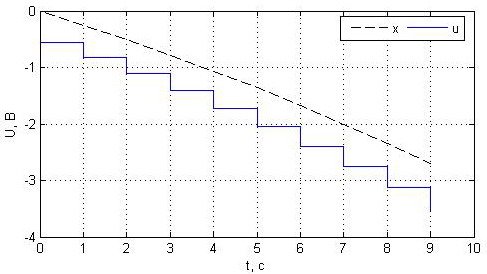
Рис. 4.2.2. Управление на границе устойчивости: КП = -1, КИД = 0.
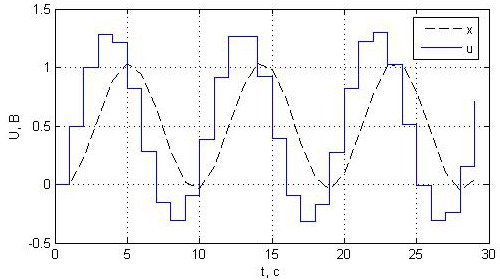
Рис. 4.2.3. Управление на границе устойчивости: КП = 0, КИД = 1.
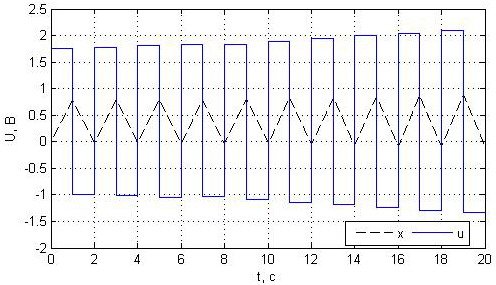
Рис. 4.2.4. Управление на границе устойчивости: КП = 3,5, КИД = 0.
5. Выводы
В ходе выполнения работы были рассчитаны и определены экспериментально области устойчивости ПИ - регулятора в зависимости от его параметров. Различия между ними
объясняются дискретностью задания параметров регулятора, а также погрешностью
коэффициентов модели объекта управления.
Приложение 1.
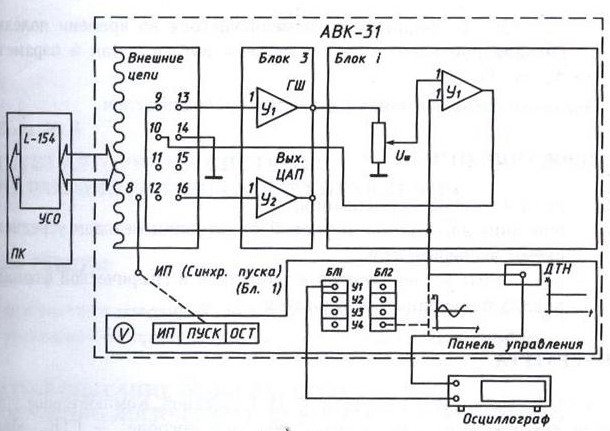
Рис. 3.1. Схема эксперимента.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.