Рис.4.17. підсилення каскаду буде мінімальним. На бокових частотах коефіцієнт зворотного зв’язку g зменшується, а КU зростає до значення, що відповідає відсутності зворотного зв’язку. Така особливість залежності KU( f ) приводиться на рис.4.17,б.
З приведених прикладів можна зробити висновок, що частотно залежні зворотні зв’язки відкривають широкі можливості в формуванні частотних властивостей підсилювачів.
Особливості схем підсилення на польових транзисторах.
 Для виявлення особливостей схем підсилювачів
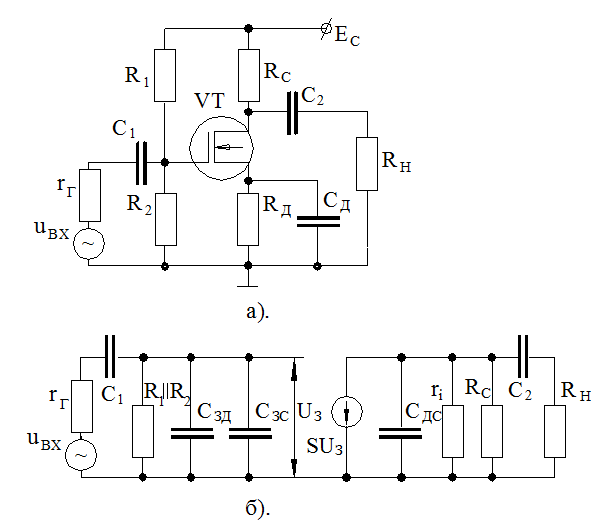
скористуємось узагальненою схемою, що приведена на рис.4.18,a. Вважаємо, що в усьому аналізуємому частотному діапазоні опір
конденсатора СД Xc<<RД, тому в схемі заміщення опір RД
враховувати не слід. Навантаження RН приєднується через С2 до стоку
транзи-стора. При цих умовах одер-жуємо схему заміщення, що приведена на
рис.4.18,б. По-дібно до схем з біполярними транзисторами вона склада-ється з
двох частин. Вхідна частина забез-печує взаємо-зв’язок між е.р.с. джерела
сигналу ег і напругою на затворі UЗ.
Для виявлення особливостей схем підсилювачів
скористуємось узагальненою схемою, що приведена на рис.4.18,a. Вважаємо, що в усьому аналізуємому частотному діапазоні опір
конденсатора СД Xc<<RД, тому в схемі заміщення опір RД
враховувати не слід. Навантаження RН приєднується через С2 до стоку
транзи-стора. При цих умовах одер-жуємо схему заміщення, що приведена на
рис.4.18,б. По-дібно до схем з біполярними транзисторами вона склада-ється з
двох частин. Вхідна частина забез-печує взаємо-зв’язок між е.р.с. джерела
сигналу ег і напругою на затворі UЗ.
Розглядаючи схему по діапазонах частот, для середньочастотного маємо:
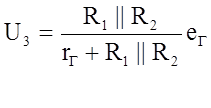 ,
,
і при rГ =0 UЗ = еГ.
В діапазоні низьких частот властивості вхідної частини схеми заміщення, подібно до біполярних транзисторів, визначаються конденсатором С1, точніше, постійною часу t1Н =С1 (R1//R2).
Наявність конденсаторів CЗД і СЗС приводить до того, що вхідні кола схеми впливають і на високочастотний діапазон частотної характеристики підсилювача. Частота f1В, з якої почнеться зниження коефіцієнта передачі розглядаємої частини схеми, задається постійною часу:
( f1В)-1 = t1В = rГ (СЗД + СЗВ)
Вхідний опір схеми визначається лише опорами R1 і R2, тобто
RВХ = R1 //R2
і набагато перевищує вхідний опір схеми на біполярних транзисторах.
Вихідна частина схеми заміщення дозволяє визначити коефіцієнт підсилення по напрузі
 ;
;
вихідний опір
RВИХ = ri // RC,
а також постійні часу низькочастотного
t2Н = С2RН
і високочастотного діапазону
t2В = СДС(ri //RД //RН ).
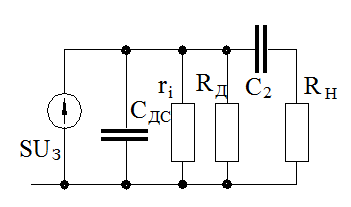 Для схеми повторювача напруги (рис. ) необхідно
прийняти ХСД =µ і RC =0, а напруга
навантаження знімається з резистора RД. В такому випадку схема заміщення вихідної
частини буде мати вигляд, що відповідає правій частині рис. 4.19. Відміна в
вихідних частинах обумовлена протилежним напрямком включення джерела струму
Для схеми повторювача напруги (рис. ) необхідно
прийняти ХСД =µ і RC =0, а напруга
навантаження знімається з резистора RД. В такому випадку схема заміщення вихідної
частини буде мати вигляд, що відповідає правій частині рис. 4.19. Відміна в
вихідних частинах обумовлена протилежним напрямком включення джерела струму ![]() , і заміною Rc на
низькоомний резистор RД.
Відповідно, одержимо коефіцієнт підсилення по напрузі
, і заміною Rc на
низькоомний резистор RД.
Відповідно, одержимо коефіцієнт підсилення по напрузі
Ku![]() SRД;
SRД;
вихідний опір
RВИХ = ri // RД » RД.
Використання зворотніх зв’язків для лінеаризації нелінійностей в електроних схемах.
Для пояснення такої властивості зворотніх звязків звернемось знову до розглянутої раніше схеми, що приведена на рис. 3.20.
Ефектівність лінеаризації забезпечується не лише завдяки наявності компенсуючої напруги UДВ/2, а також завдяки дії від’ємного зворотного зв’язку по вихідній напрузі. Пояснимо це більш детально. Напруга UВИХ обчислюється по формулі:
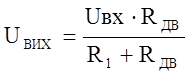 ( )
( )
Якщо виконується умова R1>> RДВ , то формула (…) може бути представлена у вигляді:

Для незначних відхилень від положення робочої точки О з заданим струмом ІСО при напрузі UВХ.О можна записати:
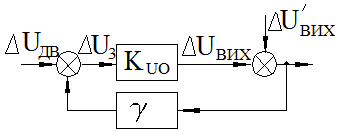
В результаті приведена на рис.3.20 схема може бути представлена в вигляді структурної схеми , зображеної на рис. 4.18, в якій прийнято:
 , а
, а  ,
,
 Якщо KUO лінійний параметр, то між DU3 і DUВИХ
буде мати місце постійна пропорція. Якщо параметр KUO нелінійний, то, наприклад, використовуючи представлення нелінійної
функції в вигляді ряду Маклорена, можна відхилення вихідного параметру від
лінійного
Якщо KUO лінійний параметр, то між DU3 і DUВИХ
буде мати місце постійна пропорція. Якщо параметр KUO нелінійний, то, наприклад, використовуючи представлення нелінійної
функції в вигляді ряду Маклорена, можна відхилення вихідного параметру від
лінійного
Рис.4.18. значення представити в вигляді аддитивної перешкоди DU’ВИХ. Тоді, в відповідності з властивостями зворотних зв’язків
 ,
,
тобто складова, обумовлена нелінійністю перетворення буде знижена в 1+gКUO раз, що еквивалентно лінеаризації нелінійності.
Приведений спосіб лінеаризації в практиці електронної техніки використовується досить широко. Стосовно приведеної схеми, то її використання корисно в тих практичних задачах, де необхідні досить низькі нелінійні спотворення при регулюванні сигналів.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.