САНКТ-ПЕТЕРБУРГСКИЙ
ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра деталей машин и ПТМ
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОЙ РАБОТЕ ПО
ТЕОРИИ МЕХАНИЗМОВ И МАШИН
Схема № 6/3
Студент группы 22ДВ1 Калинин Д.В.
Руководитель доцент Половинкина Н.Б.
Санкт-Петербург
2004
Содержание
Задание на курсовую работу. 3
1. Структурный анализ рычажного механизма. 4
1.1. Схема рычажного механизма и его краткое описание. 4
1.2. Классификация кинематических пар по четырём признакам. 5
1.3. Определение степени подвижности механизма. 5
1.4. Определение класса и порядка механизма по Ассуру. 6
2. Кинематическое исследование рычажного механизма
графо-аналитическим
методом.. 7
2.1. Построение плана положений механизма. 7
2.2. Построение плана скоростей механизма. Определение
скоростей шарнирных
точек, центров тяжести звеньев и угловых скоростей звеньев. 9
2.3. Построение плана ускорений механизма. Определение
ускорений шарнирных
точек, центров тяжести звеньев и угловых ускорений звеньев. 11
3. Силовой расчёт рычажного механизма. 14
3.1. Определение силы полезного сопротивления. 14
3.2. Определение сил тяжести звеньев. 15
3.3. Определение сил инерции и моментов сил инерции звеньев. 15
3.4. Расчёт группы Ассура 2-5. 16
3.5. Расчёт группы Ассура 3-4. 18
3.6. Расчёт группы начального звена. 20
3.7. Определение уравновешивающего момента по методу “жесткого рычага” Жуковского. 22
4. Профилирование зубчатого зацепления. 24
4.1. Выбор вида зацепления. 24
4.2. Расчёт основных размеров колёс, находящихся в зацеплении. 25
4.3. Определение масштабного коэффициента и данных для построения картины зацепления. 27
4.4. Построение диаграммы давлений. 28
4.5. Построение диаграмм удельных скольжений. 29
Список использованных источников. 30
Схема 6, вариант 3
Произвести кинематическое и динамическое исследование
механизма одноступенчатого компрессора
Содержание работы
1. Структурный анализ механизма компрессора.
2. Кинематическое исследование механизма компрессора графо-аналитическим методом.
3. Силовой расчет механизма компрессора.
4. Профилирование зубчатого зацепления.
Объем работы
1. Три чертежа формата А1.
2. Расчетно-пояснительная записка формата А4.
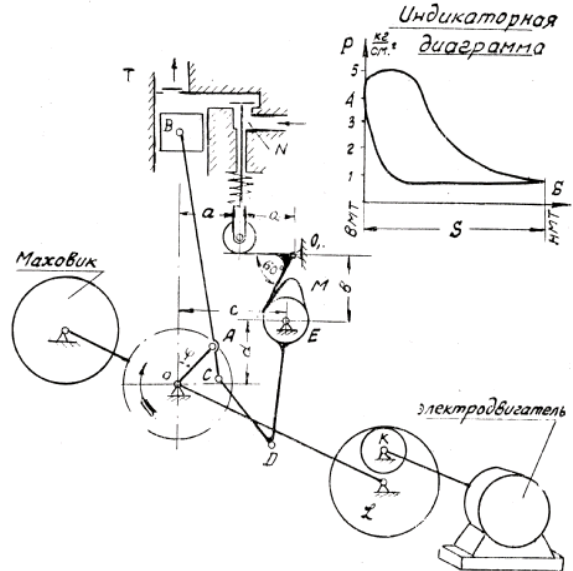
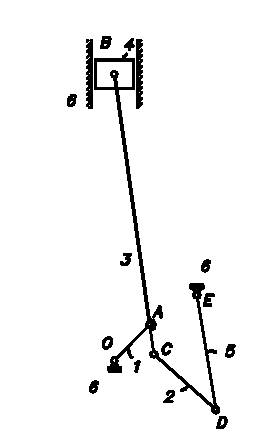
Структурная схема рычажного механизма (механизма поршневого компрессора) приведена на рис. 1.
Краткое описание механизма
Коленчатый вал компрессора, схематично изображенный в виде кривошипа OA, приводит в действие шатун AB и связанный с ним поршень компрессора B. Во время движения поршня из верхнего мертвого положения к нижнему мертвому положению происходит всасывание воздуха в цилиндр компрессора через клапан.
Открытие клапана осуществляется при помощи кулачка, качательное движение которого происходит в результате движения тяги CD и рычага DE, связанных шарнирно с шатуном СAВ.
При движении поршня из НМП в ВМП происходит сжатие воздуха и выталкивание его через автоматический клапан.
Рис. 1. Структурная схема
 |
Исходные данные для расчета рычажного механизма
Размеры звеньев Масса звеньев
OA= 85 мм, c = 140 мм, mOA = 7 кг,
AB = 425 мм, d = 110 мм. mCAB = 10 кг,
AC= 50 мм, mB = 8 кг,
CD = 140 мм,mCD = 4 кг,
DE = 195 мм, mDE = 4 кг.
Частота вращения кривошипа nOA = 450 об/мин.
Диаметр цилиндра компрессора Dц = 160 мм.
Кинематической парой называется подвижное соединение двух звеньев, ограничивающее их относительное движение.
Кинематические пары механизма компрессора показаны на рис. 2.
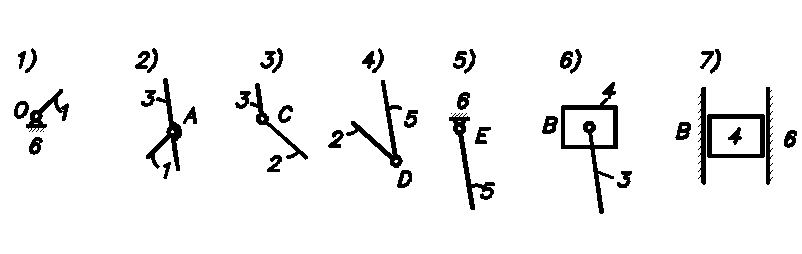
Рис. 2. Кинематические пары
По характеру соприкосновения элементов звеньев кинематические пары являются низшими.
По характеру
относительного движения звеньев кинематические пары являются
плоскими.
По числу условий связи, наложенных на относительное движение звеньев, кинематические пары являются парами 5-го класса.
По характеру замыкания элементов звеньев кинематические пары являются парами с геометрическим замыканием.
Степень подвижности плоского механизма определяется по формуле П.Л.Чебышева
![]() ,
,
где
![]() -
число звеньев механизма,
-
число звеньев механизма, ![]() =
6;
=
6;
![]() ;
;![]() - число кинематических пар пятого и четвёртого
классов,
- число кинематических пар пятого и четвёртого
классов, ![]() = 7,
= 7, ![]() = 0.
= 0.
Подставляя значения параметров в формулу Чебышева, получим
![]() .
.
Число W показывает, скольким звеньям необходимо задать закон движения для получения определенности движения всего механизма. Звено, закон движения которого задан, называется начальным звеном.
В рассматриваемом механизме начальным звеном является кривошип ОА.
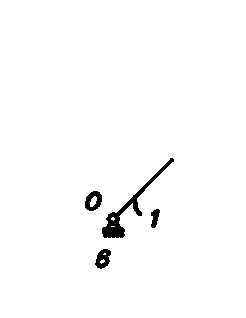
Так как степень подвижности механизма равна единице, то группа начального звена состоит из одного подвижного звена 1 и стойки 6 (рис. 3). Такая группа по классификации Ассура относится к 1-му классу, 1-му порядку.
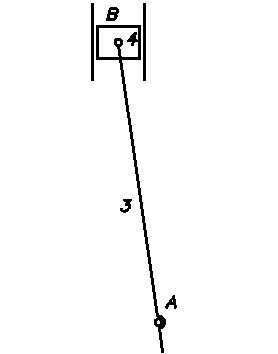
С группой начального
звена соединена группа Ассура 3-4 (рис. 4), состоящая из
шатуна 3, ползуна 4 и трех кинематических пар 5-го класса. Эта группа относится
к 1-му классу, 2-му порядку.
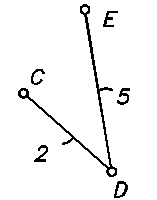
С группой Ассура 3-4 соединена группа Ассура 2-5, состоящая из шатуна 2, коромысла 5 и трех кинематических пар 5-го класса (рис. 5), которая также относится к 1-му классу, 2-му порядку.
|
|
|
|
|
Рис. 3. Группа начального звена 1-ый класс, 1-ый порядок |
Рис. 4. Группа Ассура 3-4 1-ый класс, 2-ой порядок |
Рис. 5. Группа Ассура 2-5 1-ый класс, 2-ой порядок |
Класс и порядок механизма определяется классом и порядком наиболее сложной группы, входящей в его состав. Следовательно, данный механизм 1-го класса, 2-го порядка.
Масштабный коэффициент длин – это отношение истинной длины кривошипа
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.