Министерство образования и науки
Российской Федерации
Санкт-Петербургский государственный
архитектурно-строительный университет
Автомобильно-Дорожный Факультет
Кафедра наземных транспортно-технологических
машин
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН.
ОПРЕДЕЛЕНИЕ СТЕПЕНИ ПОДВИЖНОСТИ И НАЗВАНИЯ РЫЧАЖНОГО МЕХАНИЗМА
Методические указания
Санкт-Петербург
2013
УКД 691.642: 066.354
Рецензент старший преподаватель В. В. Тихомиров (СПбГАСУ)
Теория механизмов и машин. Определение степени подвижности и названия рычажного механизма: метод. указания / сост. И. Т. Вашкинель; СПбГАСУ. – СПб., 2013. – 6 с.
Изложен метод экспериментального определения степени подвижности f на примере рычажного механизма.
Предназначены к выполнению лабораторной работы по курсу ТММ для студентов специальностей 151600, 190205, 190600, 190701, 190702, 270800.
© Санкт-Петербургский государственный
Архитектурно-строительный университет, 2013
ВВЕДЕНИЕ
Целью настоящей лабораторной работы является ознакомление студентов с методикой и простейшими средствами экспериментального определения степени подвижности и названия рычажного механизма.
Рычажный механизм включает в себя три подвижных звена и стойку – опору. Одно из подвижных звеньев ведущее и называется кривошипом, второе – ведомое и называется коромыслом, третье – звено, соединяющее кривошип и коромысло. Такое звено называется шатуном. Вместе они образуют плоский четырехзвенный механизм, состоящий из четырех низших кинематических пар. Весь механизм опирается на стойку. Степень подвижности рычажного механизма:
f = 3(n-1) - 2P5 – 1P4,
где f - степень подвижности механизма; (n-1) – число звеньев минус стойка (может быть только одна стойка); P5 – число пар пятого класса; P4 – число пар четвертого класса.
Кривошип – звено, которое совершает полноповоротное движение;
шатун – звено, которое совершает сложноплоское движение; стойка – неподвижная часть конструкции; коромысло – звено, которое совершает неполноповоротное движение.
1. Описание лабораторной установки
Установка (рисунок) состоит из стойки, кривошипа, шатуна и коромысла. Кривошип 1, опираясь на стойку 4, совершает полноповоротное движение в одну или другую сторону, что тем самым приводит в неполноповоротное движение коромысло 3 через шатун 2.
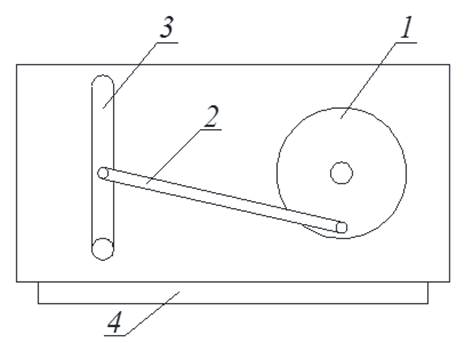
Рис.1. Установка рычажного механизма:1 – кривошип (звено, совершающее полноповоротное движение); 2 – шатун (звено, совершающее сложноплоское движение); 3 – коромысло (звено, которое совершает неполноповоротное движение); 4 – стойка (неподвижная часть конструкции).

Рис.2. Принципиальная схема рычажного механизма:
1 – кривошип; 2 – шатун; 3 – коромысло; 4 – стойка.
Измерение основных параметров:
Максимальный радиус кривошипа rmax равен 30 мм (rmax = 30 мм); длина шатуна lшатуна равна 100 мм (lшатуна = 100 мм); длина коромысла lкоромысла равна 120 мм (lкоромысла = 1200 мм); максимальный ход коромысла Smax равен 100 мм
(Smax = 100 мм); максимальный угол отклонения φmax равен 50о (φmax = 50о).
Указываем кинематические пары:
Кривошип 1 совершает вращательное движение: 1-2P5;
Шатун 2 – сложнопоступательное движение: 2-3P5;
Коромысло 3 – неполное вращательное движение: 3-4P5;
Стойка 4 – поступательное движение P5.
Определение степени подвижности:
f = 3(n-1) - 2P5 – 1P4 = 3·(4-1) - 2·4 – 0 = 9-8 = 1
Название рычажного механизма определяем исходя из названия начального и конечного звена. В данном случае начальное звено – кривошип, конечное звено – коромысло. Следовательно, рычажный механизм имеет название.
Выводы:
1. На данный плоский четырехзвенный механизм нужно поставить один двигатель, чтобы определить характер движения механизма.
2. Рычажный механизм называется: Кривошипно-коромысловый механизм.
2. Последовательность выполнения работы
1. Зарисовать схему установки.
2. Записать названия звеньев установки.
3. Указать кинематические пары.
4. Измерить основные параметры.
5. Определить степень подвижности.
6. Определить название рычажного механизма.
7. Сделать выводы.
Оглавление
Введение………………………………………………………………………………….... 3
1. Описание лабораторной установки…………………………………………………… 3
2. Последовательность выполнения работы…………………………………………….. 5
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН.
ОПРЕДЕЛЕНИЕ СТЕПЕНИ ПОДВИЖНОСТИ И НАЗВАНИЯ РЫЧАЖНОГО МЕХАНИЗМА
Методические указания
Составитель Вашкинель Илья Тадеславович
Редактор О. Д. Камнева
Корректор М. А. Молчанова
Компьютерная верстка И. А. Яблоковой
Подписано к печати 11.11.13. Формат 60х84 1/16. Бум. офсетная.
Усл. печ. л. 0,5. Тираж 200 экз. Заказ 9. «С» 4.
Санкт-Петербургский государственный архитектурно-строительный университет.
190005, Санкт-Петербург, 2-я Красноармейская ул., д. 4.
Отпечатано на ризографе. 190005, Санкт-Петербург, 2-я Красноармейская ул., д. 5.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.