2.2 Управляемой называют систему, которую можно привести из любого начального состояния в требуемое с помощью выбранного набора управляющих воздействий за ограниченный промежуток времени.
Для анализа управляемости используем критерий управляемости Калмана.
![]()
![]() Введена матрица Q:
, ранг
которой равен ,
Введена матрица Q:
, ранг
которой равен ,
при этом n (– число переменных состояния) = 2. Согласно вышеприведенному критерию система управляема, если ранг матрицы управляемости (Q)равен числу переменных состояния (n). Следовательно, система управляема.
2.3 Наблюдаемой называют такую систему, в которой по измеренным выходным сигналам можно определить все переменные состояния в любой момент времени.
![]() Для анализа наблюдаемости
используем критерий наблюдаемости Калмана.
Для анализа наблюдаемости
используем критерий наблюдаемости Калмана.
Введена матрица N = [CT,(CA)T], ранг которой равен . Для того,
Чтобы система была наблюдаемой достаточно, чтобы ранг матрицы наблюдаемости (N) был равен числу переменных состояния (n). Это условие выполнено.
3.1 Разностная модель объекта управления
Исходные данные – уравнения (1*.1) и (1*.2)
![]() . Проводим квантование по времени и
решаем эти уравнения по методу Эйлера, при этом заменяя
. Проводим квантование по времени и
решаем эти уравнения по методу Эйлера, при этом заменяя ![]() . Шаг квантования выбираем т.о.,
чтобы выполнялась теорема Котельникова
. Шаг квантования выбираем т.о.,
чтобы выполнялась теорема Котельникова ![]() (в данном случае принят шаг
квантования
(в данном случае принят шаг
квантования ![]() 0,01 с и теорема Котельникова
заведомо выполняется).
0,01 с и теорема Котельникова
заведомо выполняется).
Тогда
имеем:  (3*1.1)
(3*1.1)
 (3*1.2)
(3*1.2)
и
Т.е.:


3.2 Разностная модель Пи-регулятора
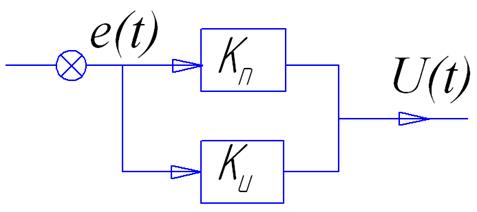
Математическая
модель регулятора имеет вид: ![]()
Выразим
второе слагаемое рекуррентным методом: ![]() e(t)=yтр(t)-y(t)=y(t)-C·x(t);
(3*2.1)
e(t)=yтр(t)-y(t)=y(t)-C·x(t);
(3*2.1)
S(tk) ≈ S(tk-1)+e(tk-1)·kи·Δt; (3*2.2)
Тогда:
![]() (3*2.3)
(3*2.3)
4. Анализ устойчивости, управляемости, наблюдаемости (разностной модели)

![]() 4.1.
Полученная система с разностными моделями объекта управления и регулятора также
будет управляема на основе выполнения критерия управляемости
Калмана: , при этом ранг в k-й
момент времени равен 2, n=2.
4.1.
Полученная система с разностными моделями объекта управления и регулятора также
будет управляема на основе выполнения критерия управляемости
Калмана: , при этом ранг в k-й
момент времени равен 2, n=2.
4.2 Критерий наблюдаемости также выполняется:
Ранг этой матрицы также равен 2 k-й момент времени равен 2, n=2.
Значит полученная система с разностными моделями объекта управления и регулятора управляема и наблюдаема.
5. Замкнутая САУ
Схема имеет вид:
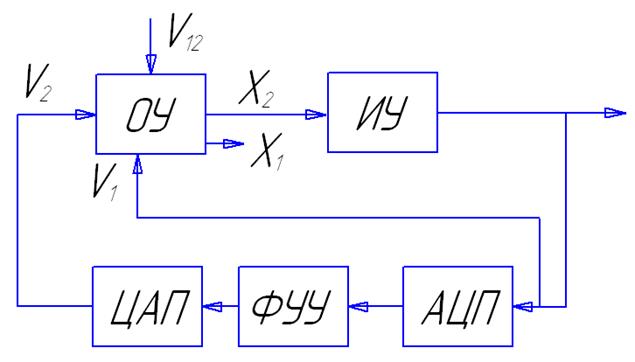
Представим уравнения (3*1.1), (3*1.2), (3*2.1)- (3*2.3) в матричном виде, для этого введем матрицы:
 ,
,  , H=[C;0],
, H=[C;0], ![]() ,
, ![]()
e(tk)=yтр(tk)-HZ(tk),
![]()
Управляющее воздействие V2(t) и оптимальные коэффициенты регулятора (переменные) определяются путем минимизации ФОР.
Для нахождения минимума ФОР используем принцип максимума.
Для
линеаризованной модели:  ;
;
![]() ,
,
где 𝛼 – параметр регуляризации (количественное выражение предпочтения затратам или погрешности).
Тогда
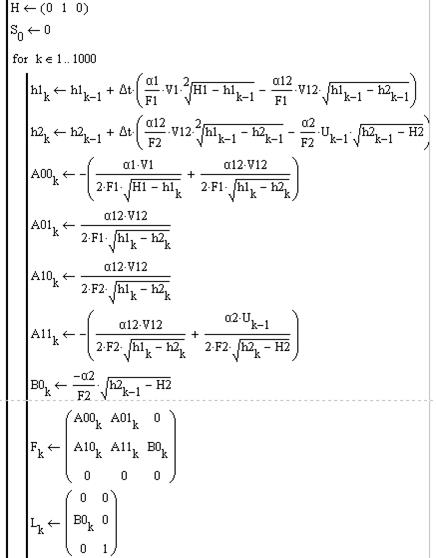
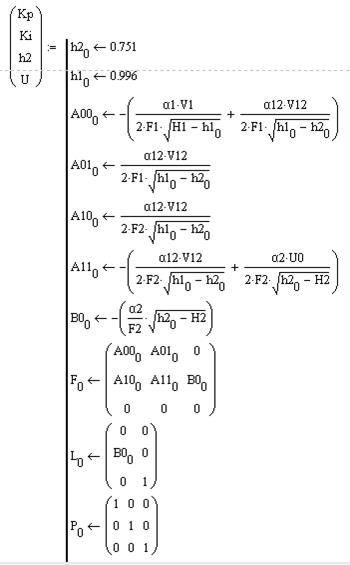
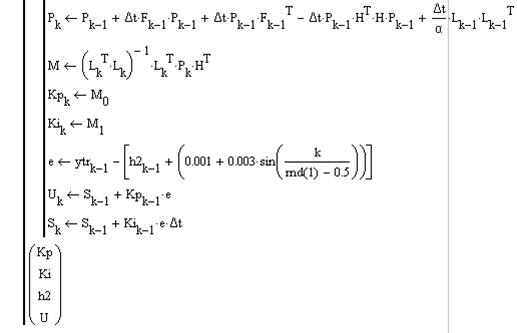
6. Моделирование переходного процесса.
Использован пакет MathCAD со стандартным набором функций.
При
моделировании в невязку сигналов добавляется шум: yтр-(h2+![]() ).
).
Листинг1 – Линеаризация.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
![]()
![]()
|
|
|
|
|
|
|
Матрица A |
|
|
|
|
|
|
|
|
|
|
|
|
|
Матрица B |
|
|
|
|
|
|
|
|
|
|
|
|
Листинг 2 – Анализ и составление разностной модели
|
|
|
матрица управляемости |
|
|
|
|
|
матрица наблюдаемости |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


![]()
![]()
![]()
Листинг 3 – Замкнутая САУ, поиск настроечных коэффициентов
|
|
![]()
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Заключение
Для нахождения необходимого управляющего воздействия был применен алгоритм минимизации функционала обобщенной работы, для чего исходная модель заменена линеаризованной. Абсолютная погрешность - 0,245 единиц, относительная -
Затем была составлена разностная модель объекта управления и регулятора с целью нахождения их текущего значения по предыдущему с заданным шагом квантования.
В замкнутой системе получены коэффициенты регулятора и оптимальный параметр регуляризации (𝛼=0,009) при котором наблюдается небольшое перерегулирование. Статическая погрешность равна 0 ((yтр)1000-h21000).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.