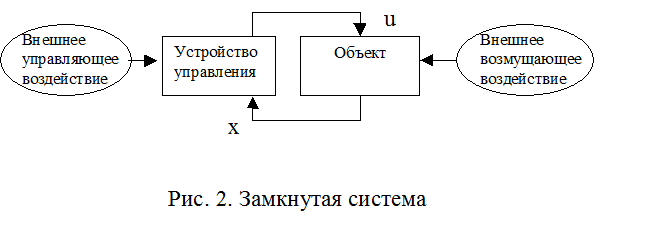
Эта схема может быть расширена и дополнена дополнительными устройствами для обработки информации. В замкнутых системах всегда существует зависимость одних переменных (сигналов) от других. Процессы здесь происходят гораздо более сложные, чем в разомкнутых.
Замкнутые системы используются везде, где требуется улучшить точность работы, повысить быстродействие выполнения задающего сигнала. Основные исследования теории управления посвящены именно системам с обратной связью.
По принципу управления все системы управления можно разделить на управляемые по отклонению (с отрицательной обратной связью); -управляемые по возмущению (разомкнутые) и комбинированные системы.
Автоматические системы можно классифицировать не только по структуре, но и по типу математических моделей , используемых для описания.
Все системы можно разделить на непрерывные и импульсные (дискретные). Первый класс включает системы, которые можно описать в непрерывном времени , предполагая, что все процессы в них происходят непрерывно (примеры e, d – с аналоговым автопилотом). В дискретных системах каждое событие (изменение состояния) происходит только в определенные моменты времени. В этом случае мы имеет дело с дискретизацией (пример d, если автопилот содержит ЦЭВМ с довольно большим периодом дискретизации, но сравнительно небольшим уровнем дискретизации выходного сигнала. В цифровых системах включающих микропроцессор обычно проходится учитывать и дискретизацию по уровню выходного и входного сигналов регулятора. Все величины в цифровой системе могут меняться только по фиксированным значениям уровней.
Автоматические системы можно также разделить на линейные, в которых все процессы можно описать с помощью линейных уравнений, и нелинейные, в которых имеются нелинейные зависимости переменных и параметров. ( при подробном рассмотрении все наши примеры являются нелинейными системами, но иногда они с успехом могут быть промоделированы с помощью линейных уравнений. Иногда целесообразно использовать линейную модель системы регулирования с переменными параметрами.
Еще один фактор классификации – фактор случайности. В этом случае следует различать системы ,в которых все процессы могут быть точно предсказаны до их реализации (детерминированные) и стохастические, в которых случайность имеет важную роль.
По назначению выделяют следующие виды автоматических систем: -системы стабилизации; -системы программного управления; -следящие системы; -поисковые системы.
Таким образом, в технике существует большое разнообразие классов автоматических систем. Для всех их можно выделить одно общее свойство. Это свойство объединяет их не только друг с другом, но и с природными динамическими системами – живыми организмами. Технические систем с обратной связью походят на растения и животные своей приспособляемостью к изменяющимся условиям внешней среды. Иными словами можно говорить об управлении как о направленном и успешном приспособлении к изменяющимся условиям внешней среды через использование обратной связи.
Таким образом, всегда, когда мы хотим исследовать систему с обратной связью , мы должны использовать специальную науку – теорию (автоматического) управления или кибернетику.
Эта наука получила основное развитие в период второй мировой войны, когда создавалось большое число систем управляемого оружия (зенитные комплексы , радиолокационные системы и т.д. В 1948 американский ученый Норберт Винер опубликовал свой труд “ Кибернетика”, ставший декларацией новой науки. В этой работе было найдено много общего между адаптацией живых организмах и в технических системах. С тех пор было проведено большое количество исследований и современная теория управления позволяет легко и быстро создавать точные и быстродействующие системы наведения оружия, управления технологическими процессами, позиционирования объектов и других полезных устройств.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.