Рис. 13.2. Классификация систем адаптивного управления станками с ЧПУ
3. Адаптивное управление точностью обработки по размеру динамической настройки
Адаптивные
системы (АС), реализующие это направление, обеспечивают стабилизацию размера
динамической настройки Ад
путем внесения в него поправки. Величина Ад
определяется АС косвенным путем посредством измерения определенного физического
параметра ![]() , характеризующего состояние процесса
обработки и находящегося в функциональной зависимости от Ад. В качестве параметра
, характеризующего состояние процесса
обработки и находящегося в функциональной зависимости от Ад. В качестве параметра ![]() могут быть приняты упругие перемещения
звеньев технологической системы, сила резания или ее составляющая, крутящий
момент, мощность, ток в обмотках двигателей и т.д.
могут быть приняты упругие перемещения
звеньев технологической системы, сила резания или ее составляющая, крутящий
момент, мощность, ток в обмотках двигателей и т.д.
Во время
обработки непрерывно измеряется фактическое значение параметра - ![]() факт
и сравнивается с заданным значением -
факт
и сравнивается с заданным значением - ![]() исх, которое пропорционально
заданному уровню динамической настройки Ад.
Если при этом обнаруживается рассогласование
исх, которое пропорционально
заданному уровню динамической настройки Ад.
Если при этом обнаруживается рассогласование ![]()
![]() =
= ![]() факт -
факт - ![]() исх, которое в свою очередь
пропорционально отклонению размера Ад
- (
исх, которое в свою очередь
пропорционально отклонению размера Ад
- (![]() Ад),
то исполнительный механизм АС изменяет размер динамической настройки до тех
пор, пока
Ад),
то исполнительный механизм АС изменяет размер динамической настройки до тех
пор, пока ![]()
![]() не станет равным нулю,
а следовательно и размер Ад, не станет равным допустимому
значению.
не станет равным нулю,
а следовательно и размер Ад, не станет равным допустимому
значению.
Поправка в размер динамической настройки Ад вносится посредством изменения силы резания или жесткости технологической системы. Второе направление обычно трудно реализуемое. Поэтому большинство АС в качестве регулятора использует силу резания.
Сила резания Ру является функцией многих переменных
Ру=![]() ×Ср×Sq×t,
×Ср×Sq×t,
где: t - глубина резания;
S - подача;
Cр - коэффициент, учитывающий твердость обрабатываемого материала;
q - коэффициент, учитывающий другие условия обработки;
![]() - коэффициент, характеризующий
отношение составляющей Ру
к общей силе резания Р.
- коэффициент, характеризующий
отношение составляющей Ру
к общей силе резания Р.
Ранее
указывалось, что на изменение размера динамической настройки Ад наиболее сильное влияние
оказывают колебания припуска ![]() заг и твердости материала
заг и твердости материала ![]() Ср
заготовки, то есть:
Ср
заготовки, то есть:
![]()
 ;
;  ,
,
Из
приведенных формул следует, что универсальным параметром, за счет которого
можно управлять силой резания, величинами ![]() Ад1 и
Ад1 и ![]() Ад2
является подача.
Ад2
является подача.
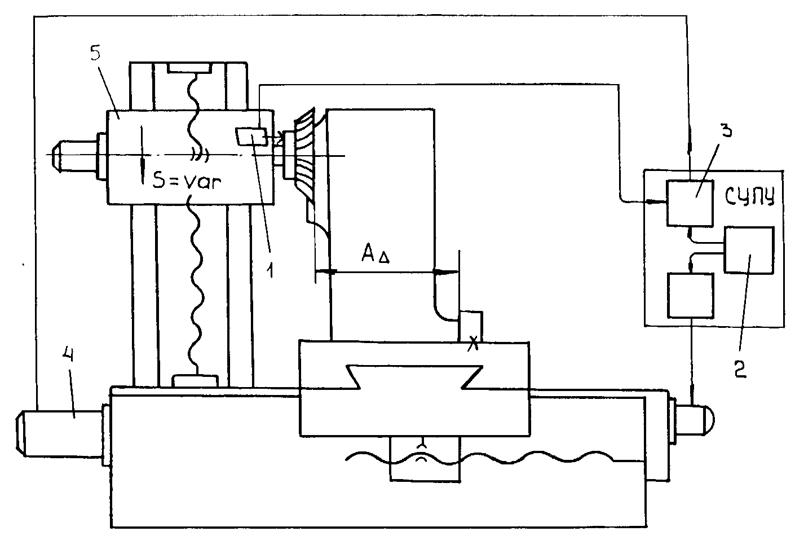
На рис. 13.3 показана схема станка с ЧПУ, оборудованного АС управления упругими перемещениями.
|
Рис. 13.3. Адаптивное управление упругими перемещениями технологической системы на станке с ЧПУ. |
Данная адаптивная система работает следующим образом.
Интерполятор 2 СЧПУ задает величину рабочей подачи через блок 3, управляющий движением инструмента по координате Y, приводу 4, который сообщает шпиндельной бабке 5 рабочую подачу S при расчетных величинах припуска на обработку и твердости материала обрабатываемой заготовки. На шпиндельной бабке станка установлен датчик 1, измеряющий упругое перемещение шпинделя относительно бабки.
В тех случаях, когда припуск и твердость материала оказываются больше, сила резания увеличивается, а следовательно возникает отклонение величины Ад динамической настройки, измеряемого датчиком упругих перемещений 1. Датчик передает по каналу обратной связи фактическое значение размера динамической настройки Ад.факт в блок 3, где эта величина сопоставляется с заданным исходным значением Ад.исх. После этого отрабатывается знак рассогласования и автоматически вносится изменение в величину подачи S до тех пор, пока величина упругого перемещения не достигнет требуемой.
Недостатком использования подачи, как регулятора силы резания, является изменение шероховатости обработанной поверхности.
Для адаптивного управления процессом обработки необходимо непрерывно или с некоторой периодичностью измерять параметр процесса резания. Вопрос измерения параметров процесса резания - один из наиболее сложных при реализации АС.
В различных АС измеряемыми параметрами могут быть составляющие силы резания, крутящий момент на шпинделе, мощность резания, износ инструмента, температура резания, вибрации и т.д. В связи с этим были разработаны различные по назначению, принципу действия и конструкции измерительных устройств.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.