Если записать входной
сигнал в виде ![]() , то можно представить выходной
сигнал системы как
, то можно представить выходной
сигнал системы как
где ![]() - весовая функция непрерывной части:
- весовая функция непрерывной части:
![]() .
.
Используем z-преобразование:
 .
.
В соответствии с теоремой свертки:
Y(z)=W(z)X(z),
Где  - импульсная передаточная функция
непрерывной части.
- импульсная передаточная функция
непрерывной части.
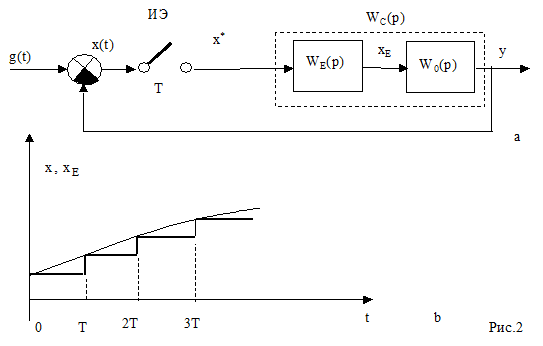
В реальных импульсных системах обычно используется экстраполятор с фиксацией входного значения на периоде (Рис.2b). В этом случае передаточная функция экстраполятора, называемого экстраполятором нулевого порядка, будет равна
 .
.
Передаточная функция разомкнутой системы в общем случае (при наличии смещения по времени) будет определяться как:
 ,
,
где  .
.
Для  .
.
Например:
 ;
;
 .
.
В соответствии с предыдущей таблицей:
 ,
,
где ![]()
 .
.
Для замкнутой системы (рис.2a) импульсная передаточная функция будет иметь вид:
 .
.
Она связывает величины входного ![]() и выходного
и выходного ![]() сигналов
через z-преобразование:
сигналов
через z-преобразование: ![]() . Аналогично
с непрерывными системами можно ввести передаточную функцию по ошибке для
замкнутой системы:
. Аналогично
с непрерывными системами можно ввести передаточную функцию по ошибке для
замкнутой системы:
 .
.
Вообще говоря, все свойства линейных передаточных функций, связанные со структурными преобразованиями (последовательное и параллельное соединения, перенос узлов и сумматоров) могут быть расширены на область дискретных передаточных функций.
Для импульсных систем можно также ввести понятие частотной передаточной функции (частотной характеристики):
 .
.
С использованием этой характеристики можно найти амплитуду и фазу выходного сигнала системы.
Устойчивость импульсной системы, как и в случае
непрерывных систем, определяется распределением корней характеристического
уравнения. Для устойчивости они должны имет отричательную действительную часть,
а границей устойчивости является мнимая ось комплексной плоскости. Когда используется
z-преобразование, подстановка ![]() преобразует эту ось в
окружность единичного радиуса. Следовательно, для устойчивости необходимо,
чтобы характеристическое уравнение, полученное из передаточной функции разомкнутой
импульсной системы
преобразует эту ось в
окружность единичного радиуса. Следовательно, для устойчивости необходимо,
чтобы характеристическое уравнение, полученное из передаточной функции разомкнутой
импульсной системы
1+W(z)=0
Должно иметь все корни, лежащие внутри круга, описанного вокруг начала координат с единичным радиусом на z-плоскости:
|zi|<1.
Например, для системы первого порядка с характеристическим уравнением z+A=0 условие устойчивости имеет вид |A|<1 .
Для системы второго порядка:
z2+Az+B=0 (2)
условия устойчивости имеют вид
 .
.
Для систем более высокого порядка исследование устойчивости с помощью характеристического уравнения более трудоемко. Иногда для решения этой задачи используют w - преобразование (конформное преобразование):
 .
.
Заменяя z на ![]() , получим:
, получим:
 ,
,
где  - относительная
псевдочастота.
- относительная
псевдочастота.
Абсолютная псевдочастота определяется формулой:
 .
.
Для малых значений частоты ![]() :
:
 .
.
Поэтому для частот, удовлетворяющих условию ![]() можно заменить псевдочастоту реальной
частотой. Это свойство можо использовать для вычисления установившейся ошибки
при гармоническом входном сигнале.
можно заменить псевдочастоту реальной
частотой. Это свойство можо использовать для вычисления установившейся ошибки
при гармоническом входном сигнале.
Легко видеть, что для изменения частоты в диапазоне ( ) величина псевдочастоты изменяется от
) величина псевдочастоты изменяется от ![]() до
до ![]() и точка,
соответствующая комплексной величине w перемещается вдоль мнимой оси.
Следовательно, мнимая ось для w – преобразования является границей области
устойчивости: облать устойчивости расположена слева от мнимой оси для корней
характеристического уравнения, записанного для w -преобразования.
Например, используя w – преобразование, уравнение (2) может быть
преобразовно к виду
и точка,
соответствующая комплексной величине w перемещается вдоль мнимой оси.
Следовательно, мнимая ось для w – преобразования является границей области
устойчивости: облать устойчивости расположена слева от мнимой оси для корней
характеристического уравнения, записанного для w -преобразования.
Например, используя w – преобразование, уравнение (2) может быть
преобразовно к виду
![]() .
.
В соответствии с критерием устойчивости для линейных систем, коэффициенты характеристического уравнения системы второго порядка должны быть положительными. Это приводит к ранее полученным условиям устойчивости (3).
Для определения устойчивости замкнутой импульсной системы можно использовать критерий Найквиста. Как для z –преобразования, так и для w-преобразования, амплитудно-фазовая характеристика разомкнутой системы для устойчивости замкнутой не должна охватывать точку (-1, i0).
Следует иметь в виду, что для W(z), характеристика W(![]() ) является периодической функцией
) является периодической функцией ![]() с периодом
с периодом ![]() .
.
Рассмотрим пример: 
 .
.
В координатах (u,![]() ) характеристика
W(
) характеристика
W(![]() ) представляет собой вертикальную прямую
линию (рис.3). Отсюда можно найти условие устойчивости KT<2.
) представляет собой вертикальную прямую
линию (рис.3). Отсюда можно найти условие устойчивости KT<2.
Если выполнить для передаточной функции W(z) w-преобразование, то получим передаточную функцию разомкнутой системы в виде:
 .
.
Выполним подстановку  :
:
 .
.
Таким образом, w-преобразование дает непериодическую функцию псевдочастоты, а потому для псевдочастоты возможно построение асимптотической ЛАЧХ.
Используя указанный путь можно получит дискретную
передаточную функцию и для замкнутой системы по полезному сигналу ![]() и по ошибке
и по ошибке ![]() .
Аналогично строятся и псевдочастотные характеристики
.
Аналогично строятся и псевдочастотные характеристики  и
и
 .
.
В простых дискретных системах оценка качества регулирования производится также, как и для линейных систем: построив кривые переходных процессов или используя частотные критерии качества. Наиболее простым является использование коэффициента колебательности. Как и в линейных системах, приемлемое значение коэффициента колебательности обеспечивается, когда АФЧХ не пересекает границу запретной области, расположенной в круге с центром в (-1, i0).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.