Лекция 6
Методы решения дифференциальных уравнений систем управления. Операторные методы.
Преобразование Лапласа
План:
1. Численные методы решения дифференциальных уравнений
2. Аналитические методы решения дифференциальных уравнений
3. Преобразование Лапласа и его свойства
Продолжая изучать свойства следящей системы, рассмотренной в предыдущих лекциях, рассмотрим, как можно решить дифференциальные уравнения системы, записанные в форме (1). Эта форма носит название нормальной формы Коши. В левой части уравнений мы имеем производные первого порядка по времени от фазовых переменных, правая часть уравнений выражает их через независимые фазовые переменные и внешние воздействия.
Для решения системы мы должны знать начальные условия по всем фазовым переменным и их скоростям, выражения для внешних воздействий.
Наиболее распространенный путь решения дифференциальных уравнений – это их численное интегрирование. Наиболее простым и распространенным методом численного интегрирования является метод Эйлера. Для его использования необходимо задать элементарный шаг по времени h. Затем для каждой фазовой переменной записывается выражение,
где xi0-начальное значение переменной xi (xi0=xi(t=0)).
В качестве производных ![]() мы должны подставить
правые части дифференциальных уравнений в нормальной форме, вычисленные для
данных начальных условий.
мы должны подставить
правые части дифференциальных уравнений в нормальной форме, вычисленные для
данных начальных условий.
Для нашего примера следящей системы, рассмотренной выше фазовые переменные будут вычисляться в соответствии с системой уравнений :
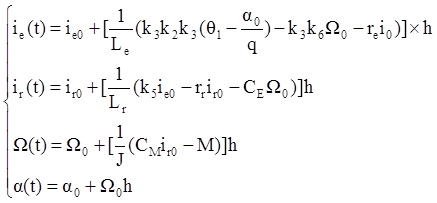
В соответствии с этой системой мы должны вычислить величины всех фазовых переменных для момента времени t=0+h. Затем мы принимаем xi0=xi и повторяем все вычисления для новых значений фазовых переменных для моментов времени t=2h, далее для t=3h и т.д. Так мы можем построить функции xi(t); (t=h, 2h, 3h…) в качестве решения системы . Чем меньше величина шага h, тем выше точность вычислений. Другие более сложные и точные методы численного интегрирования (например Рунге-Кутта) имеют специальные средства устранения накапливающейся ошибки
Основным преимуществом численных методов является то, что они используются для анализа не только линейных, но и нелинейных систем управления. Однако их главный недостаток – большие затраты вычислительных ресурсов.. Поэтому для линейных систем предпочтительнее использовать аналитические выражения для решений дифференциальных уравнений.
В соответствии с классическим методом решения дифференциальных уравнений необходимо с учетом формы уравнения составить его характеристическое уравнение, при решении которого определяется вид функции , являющейся решением. Затем для подобранной формы по начальным условиям определяются константы – параметры.
Пусть имеется дифференциальное уравнение в свернутой форме ((3) из предыдущей лекции).
D(p)x(t)=Q(p)g(t)+N(p)f(t), (1)
где D(p), Q(p), N(p) – полиномы относительно обобщенного оператора
дифференцирования 
x(t) – переменная состояния системы;
g(t) и f(t) – управляющее и возмущающее воздействия.
Тогда решение дифференциального уравнения (1) может быть описано формулой:
x(t)=x0(t)+xp(t),
где x0(t) – общее решение однородного уравнения D(p) x(t)=0, которое имеет форму
![]()
в которой C1..Cn – константы, определяемые начальными условиями;
p1..pn – корни характеристического уравнения D(p)=0.
Частное решение xp(t) определяется правой частью уравнения (1) и соответствует некоторому установившемуся процессу при функционировании системы. Частные решения для различных управляющих и возмущающих воздействий могут вычисляться независимо, а затем быть просуммированы (об этом подробнее будет указано ниже).
Исследование связей между входным и выходным сигналами значительно облегчается, если использовать изображения сигналов в преобразованиях Фурье и Лапласа.
Пусть имеется сигнал ![]() .
.
Преобразование Лапласа этой функции времени будет иметь свойства, перечисленные в таблице 1.
Таблица 1 Свойства преобразования Лапласа
|
Сигнал |
|
|
Изображение (Прямое преобразование) |
|
|
Комплексная переменная ( оператор Лапласа) |
|
|
Ядро (решение) |
|
|
Условие существования |
|
|
Обратное преобразование |
|
|
Свертка |
|
Преобразование Лапласа позволяет решить дифференциальные уравнения системы более экономичным способом, чем с применением обычных приемов.
Для этого используют таблицу стандартных изображений функций по Лапласу (при нулевых начальных условиях ): (Таблица 2).
Таблица 2 Преобразование Лапласа стандартных функций
|
F(t) |
|
|
1 (t) |
1/p |
|
|
A/p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для решения дифференциального уравнения, необходимо применить преобразование Лапласа к его правой и левой частям. Затем находят изображение выходной величины в преобразовании по Лапласу. После разложения этого изображения на элементарные слагаемые в соответствии с Таблицей 2 мы легко можем найти оригинал функции изменения выходной величины (с нулевыми начальными условиями). Если начальные значения переменных отличны от нуля, то используют следующую теорему:
Теорема 1:
Если функция f(t) и первая производная ![]() являются оригиналами и F (p) - изображение
по Лапласу, то
являются оригиналами и F (p) - изображение
по Лапласу, то
L [![]() ] = p F (p) - f (0 +),
] = p F (p) - f (0 +),
Где f (0 +) = ![]() .
.
Для производных более высокого порядка мы можем найти изображение в соответствии с формулой:

Еще одна важная теорема о конечном значении в преобразовании Лапласа используется для оценки установившихся значений сигналов:
Теорема 2:
Если функция f (t) и ее первая производная ![]() являются оригиналами и F (p) - изображение
по Лапласу, и p F (p) - аналитическая функция, то
являются оригиналами и F (p) - изображение
по Лапласу, и p F (p) - аналитическая функция, то
![]()
Рассмотрим пример:
Требуется найти решение дифференциального
уравнения ![]() с начальными условиями x(0)=0;
с начальными условиями x(0)=0; ![]() .
.
Решение:
Пусть ![]() .
Выполним преобразование Лапласа с учетом выражения (2):
.
Выполним преобразование Лапласа с учетом выражения (2):

В соответствии с таблицей 2:
x(t)=-(t-0.5exp(t)+0,5exp(t))1(t)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.