
Постановка задачи.
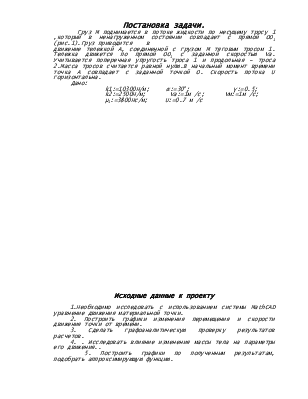
Груз М поднимается в потоке жидкости по несущему тросу 1 ,который в ненагруженном состоянии совпадает с прямой ОО1 (рис.1).Груз приводится в
движение тележкой А, соединенной с грузом М тяговым тросом 1. Тележка движется по прямой ОО1 с заданной скоростью Va. Учитывается поперечная упругость троса 1 и продольная – троса 2.Масса тросов считается равной нулю.В начальный момент времени точка А совпадает с заданной точкой О. Скорость потока U горизонтальна.
Дано:
k1:=10300H/м; α:=30o; γ:=0.5;
k2:=2500H/м; Va:=1м /с; Vм:=1м /c;
µ1:=3800Hc/м; U:=0.7м /с
Исходные данные к проекту
1.Необходимо исследовать с использованием системы MathCAD уравнение движения материальной точки.
2. Построить графики изменения перемещения и скорости движения точки от времени.
3. Сделать графоаналитическую проверку результатов расчетов.
4. . Исследовать влияние изменения массы тела на параметры его движения..
5. Построить графики по полученным результатам, подобрать аппроксимирующую функцию.
Описание реализации задач и выводы
Составление уравнений движения. Расчетная механическая модель системы представлена_на рис. 2. На материальную точку М действуют сила G, сила F1 упругости троса 1, сила F2 упругости троса 2, сила .S1 вязкого трения.
Запишем в векторной форме уравнение Ньютона движения точки:
m(dvM /dt)=G+F1+F2+S1. (1) '
Здесь
F1= -k1 r BM , F2=-k2 r AM , S1=-mvr (2)
Векторы поперечной деформации rBM троса 1, продольной rAMтроса 2 и вектор vrскорости относительно потока определяются выражениями
rBM = rM - r B , rAM =rM -- rA (3)
vr =vM −U
Уравнение (1) удобно расписать в проекциях на оси системы координат Оху с началом в точке О и осью .x, совпадающей с направлением ОО1. В этой системе координат векторы из (1), (2), (3) задаются проекциями
rM(x,y), rB(x,0), rA(vA t , 0);
vM(x,y), U(Ucosα,−Usinα);
G(Gsinα,−Gsinα), F1(0,−κ1y);
F2 (−κ2(x−vA),−κ2y);
S1(−µ1(x−Ucosα),−µ1(y+Usinα)) . (4)
Подставим (4) в (1),получим
mx=−κ2(x−vA)−µ1(x−Ucosα)−Gsinα;
my=−(κ1+κ2)y−µ1(y+Usinα)−Gcosα. (5)
для заданных числовых значений параметров (5) примет вид
x=−2,34(x−t)−3,55x−0,78
y=−12y−3,55y−6,34.
Определение установившегося движения.
Отыскиваем частные решения системы (6) вида
x* =C1t+C2 , y*=C3t+C4 (7)
где Сь С2, С3, С4 — неизвестные константы. Подставим (7) в (6) и
сгруппируем слагаемые:
2,34(C1-1)t+(2,34C2 + 3,55C1+0,78)=0;
12С3t+(З,55Сз + 12С4+6,34)=0.(8)
Уравнения (8) обращаются в тождества, когда коэффициенты при
первой и нулевой степени tпорознь равны нулю. Отсюда
C1 = l; С2= — 1,85; С3=0; С4 = — 0,53.
Установившееся движение (7) по координатам примет вид
x*=t−1,85; y*=−0,53,(9)
по скоростям
vMx * =(d/dt)x*=1 ; vMx *=(d/dt)y* (10)
Определение начальных условий. Начальные условия системы (6) по координатам заданы в рассогласованиях от установившегося решения
rM (0)=0,5rM *(0).(11)
Из (9), (11) запишемx(0)=0,5x*(0) = -0,93 м,у(0) = 0,5y*(0) = 0,27 м
Оценка характерного времени переходного процесса. Запишем характеристические уравнения, соответствующие системе (6): λ2 + 3,55λ +2,34 = 0, λ2 + 3,55λ+ 12=0.
Корни этих уравнений λi= —0,88, λ2= —2,68, λ3,4= — 1,78± ±i2,97. Следовательно, движение системы имеет одну колебательную и две апериодические составляющие. Найдем период и постоянные времени этих составляющих:
Tп = 6,28/2,97=2,11с, T1 = 1/0,88= 1,14 с,-
T2=1/2,68 = 0,373с. (12)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.