СКОЛЬКО ЛИНИЙ ПРЕРЫВАНИЙ ИМЕЕТ СИСТ. ШИНА NetWizrd???
ИСПиУ
|
1. 177. |
Что означает термин "время поллинга" в пакете iFIX? |
1. Интервал времени, через который производится обмен информацией между таблицей DIT и блоками базы данных. 2. Интервал времени, через который производится обмен информацией между SCADA-узлами. 3. Интервал времени, через который прекращает работу FIX32 при отсутствии защитного ключа, вставленного в параллельный порт компьютера. 4. Интервал времени, через который производится обмен информацией между таблицей DIT и модулями ввода-вывода. 5. Случайный интервал времени между изменением значения на входе модуля ввода, при работе в режиме прерываний. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2. 178. |
Какой тип модулей ввода-вывода означает адрес AL64: 40099 при использовании протокола Modbus? |
1. Дискретного ввода. 2. Дискретного вывода. 3. Релейного вывода. 4. Аналогового вывода. 5. Аналогового ввода. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3. 179. |
С помощью какого блока FIX32 можно считать значение с модуля дискретного вывода? |
1. DI. 2. DO. 3. AI. 4. AO. 5. AA. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4. 181. |
Какие блоки называются первичными? |
1. Блоки, которые мы поставили в начало цепочек. 2. Блоки, совершающие аналого-цифровое преобразование. 3. Блоки, имеющие более высокий приоритет. 4. Блоки, определенных типов, которые опрашивают таблицу DIT с заданной периодичностью, и с которых начинается расчет цепочек. 5. Уединенные блоки. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5. |
С помощью какой утилиты производится создание цепочек из блоков в пакете FIX32? |
1. Database Builder. 2. SCU. 3. SAC. 4. I/O Driver. 5. View. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6. |
Если уровень приоритета сигнализации узла M, то с блоков с каким уровнем приоритета будут поступать аварийные сообщения? |
1. L 2. M 3. H,M 4. L,M 5. L,M,H |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
7. |
Если в блоке DC
iFix, задано выражение |
1. Ждать 5 с выполнения всех условий, заданных шаблоном (4 контакт закрыт или 1 открыт)и переход на 12 оператор, а при невыполнении- переход на следующий оператор; 2. Ждать 12с выполнения одного из условий, заданных шаблоном (4 контакт закрыт или 1 открыт) и переход на 5 оператор, а при невыполнении - переход на следующий оператор; 3. Ждать 5с выполнения одного из условий, заданных шаблоном (13 контакт закрыт или 16 открыт) и переход на следующий оператор, а при невыполнении- переход на 12 оператор; 4. Ждать 5с выполнения одного из условий, заданных шаблоном (13 контакт закрыт или 16 открыт) и переход на 12 оператор, а при невыполнении - переход на следующий оператор; 5. Ждать 12с выполнения одновременно всех условий, заданных шаблоном (13 контакт закрыт и 16 открыт) и переход на 5 оператор, а при невыполнении - переход на следующий оператор; |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
8. |
Системы какого класса соответствуют АСОДУ-автоматизированным системам оперативно- диспетчерского управления? |
1. DCS 2. SCADA 3. MES 4. СРМ 5. ERP |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
9. |
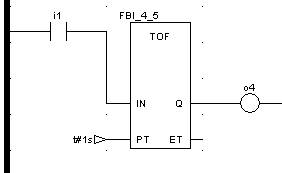
Дана программа для ПЛК на языке LD в пакете Concept и временная диаграмма для входа i1.
Какая временная диаграмма для выхода o4 верна? |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
10. |
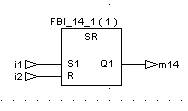
Дана программа для ПЛК на языке FBD в пакете Concept и временная диаграмма для входов i1 и i2.
Какая временная диаграмма для выхода m14 верна? |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ещё по таймерам On,Off,Tp. Sr и Rs в Сoncept |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Моделирование |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
89. |
Какую последовательность этапов предполагает решение задачи построения модели? |
1. Сбор априорной информации - выбор способа решения и стратегии его реализации - постановка задачи - реализация выбранного способа решения - анализ и интерпретация результатов. 2. Постановка задачи - сбор априорной информации - выбор способа решения и стратегии его реализации - проверка выбранного способа решения - реализация выбранного способа решения - анализ и интерпретация результатов. 3. Выбор способа решения и стратегии его реализации - сбор априорной информации - постановка задачи - проверка выбранного способа решения - реализация выбранного способа решения - анализ и интерпретация результатов. 4. Постановка задачи - выбор способа решения и стратегии его реализации - сбор априорной информации - проверка выбранного способа решения - реализация выбранного способа решения - анализ и интерпретация результатов. 5. Реализация выбранного способа решения - постановка задачи сбор априорной информации - выбор способа решения и стратегии его реализации - проверка выбранного способа решения - анализ и интерпретация результатов. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
90 |
Оценивая динамические пара-метры модели объекта управления путем активного эксперимента, исследователь нарушает нормаль-ный технологический режим работы объекта. Какой из активных экспериментов нанесет минималь-ный ущерб. |
1. Снятие кривой разгона. 2. Снятие импульсной переходной характеристики. 3. Регистрация случайных процессов на входе и выходе объекта. 4. Снятие функции отклика на периодическое возмущение. 5. Снятие функции отклика на ступенчатое возмущение по составу потока. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
91. |
Какие допущения целесообразно принять при построении модели гомогенизатора гидрометаллургического передела вида:
1. Рабочий объем гомогенизатора максимален. 2. Рабочий объем гомогенизатора постоянен. 3. Качественные показатели среды в рабочем объеме гомогенизатора равны качественным показателям среды на его выходе. 4. Входной поток постоянен и равен Qн. 5. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
92. |
Какое слагаемое (слагаемые) в правой части можно исключить из модели теплообменного аппарата смешения (без фазовых превращений) без потери качества модели.
1. 1, 2 и 6 2. 3, 4 и 6 3. 4,5 и 6 4. 4 5. Слева от знака равенства поставить «0». |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
93. |
Как в системе MatLab создать вектор-столбец v, состоящий из элементов второй строки матрицы А? |
1. v = A(:,2). 2. v := A(:,2)'. 3. v = A(2,:). 4. v := A(2,:)'. 5. v := A(2,2). |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
94. |
При каком условии трубчатый аппарат может быть описан эле-ментарным звеном запаздывания. Q(t) - входной поток; L, d, F - длина, диаметр и площадь поперечного сечения трубчатого аппарата соответственно. |
1. Q(t) < 0, L(t) ® ¥. 2. Q(t) > 0, L(t)/d(t) ® 50. 3. L(t)/d(t) ® 50, F(t) = const. 4. Q(t) = const, F(t) = const. 5. F = const, L/d > 50. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
95. |
Как в пакете Control System Toolbox, входящим в MatLab, задать передаточную функцию: W(p)=(3p2+2)/(4p3+2p+1)? |
1. ss([2 0 3],[4 0 2 1]). 2. tf([3 0 2],[4 0 2 1]). 3. tf([3 2],[4 2 1]). 4. tf([1 2 0 4],[2 0 3]). 5. tf([4 0 2 1],[3 0 2]). |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
96. |
Как в пакете Control System Toolbox, входящим в MatLab, задать описание следующей дискретной системы управления в пространстве состояний: X(k+1)
= Ф*X(k) + G*U(k), |
1. ss(A,B,C,D,0.5). 2. ss(A,B,C,0). 3. ss(G,Ф,C,0,0.5). 4. ss(Ф,G,C,0,0.5). 5. ss(Ф,G,C). |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
97. |
Если требуется получить авто-коррелированный случайный про-цесс с экспоненциальной автокор-реляционной функцией вида Rx(t) = 3*exp(-6t), то каким должно быть уравнение формирующего фильт-ра? |
1. dx/dt = -6x + ksi. 2. dx/dt = 3x + v. 3. dx/dt = 9x + ksi. 4. dx/dt = -3v + v. 5. dy/dx = 7v + ksi. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
98. |
Что означает оператор ADVANCE 16,4 в следующем фрагменте программы на языке моделирования систем массового обслуживания. GPSS? GENERATE 16,6 QUEUE AQ SEIZE A DEPART AQ ADVANCE 16,4 RELEASE A TERMINATE START 1 |
1.Генерирует поток заявок с экспоненциальным законом распределения. 2.Генерирует поток заявок с равномерным законом распределения. 3.Задает экспоненциальный закон распределения для времени обслуживания заявок прибором. 4.Задает равномерный закон распределения для времени обслуживания заявок прибором. 5.Освобождает очередь. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
99 |
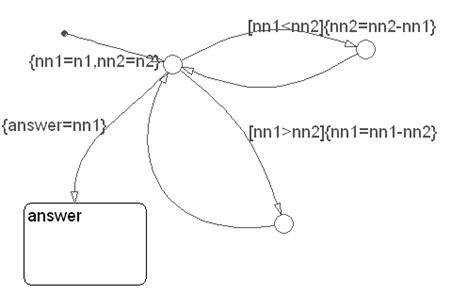
Дан фрагмент программы в виде диаграммы на графическом языке моделирования событий StateFlow:
Если n1=2, а n2=4, то чему будет равна переменная answer? |
1. 1 2. 2 3. 3 4. 4 5. 5 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
100. |
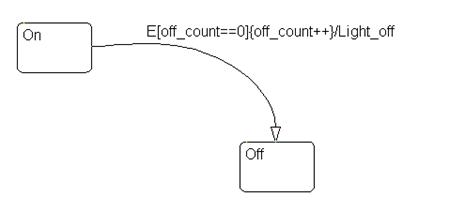
Дан фрагмент программы в виде диаграммы на графическом языке моделирования событий StateFlow:
В каком состоянии окажется система и какое значение примет переменная off_count, если при входе в диаграмму произошло событие E и значение переменной off_count равно нулю? |
1.On и 0 2. On и 1 3. On и 0 4. Off и 1 5.Light_off и 1 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
101. |
Как задать представленную ниже нерерывную систему в пространстве состояний и как преобразовать её к виду передаточной функции с явным выделением нулей и полюсов?
|
1. sys=ss(-2,1,1,3); sys=tf(sys); 2. sys=zpk(-2,1,1,3); sys=ss(sys); 3. sys=ss(-2,1,1,3); sys=zpk(sys); 4. sys=c2d(-2,1,1,3); sys=tf(sys); 5. sys=d2c(ss); sys=zpk(sys); |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
102. |
Eсли в Matlab задана представленная ниже нерерывная система в
пространстве состояний (есть объект с именем sys), то как
преобразовать её к дикретному виду c шагом 2с(объект с именем sysd)
и получить матрицы F, G? dx/dt=2u –x x(k+1)=F*x(k)+G*u(k) y=3x+u y(k)=C*x(k)+D*u(k) |
1. sysd=d2c(sys); [F,G]=ssdata(sysd,2); 2. sysd=c2d(sys,2); [F,G]=ssdata(sysd); 3. sysd=c2d(sys,2); [F,G]=tfdata(sysd,2); 4. sysd=c2d(sys,'zoh'); [F,G]=ssdata(sysd,2); 5. sysd=ssdata (sys,2); [F,G]=c2d(sysd); |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
103. |
С помощью функций System Control Toolbox необходимо задать в Matlab следующую замкнутую систему
sys=append(s1,s2,s3,s4); Q=?; in=[1 6]; out=[3 4]; s_com=connect(sys,Q, in,out); Как правильно задать матрицу соединений Q? |
1. Q=[1, 3, 0; 2, 4, 5; 4, -2, 6] 2. Q=[1, 0, 0; 2, -4, 5; 3, 1, 0; 4, 2, 0] 3. Q=[2,-4, 5; 3, 1, 0; 4, 2, 0; 5, 2, 0] 4. Q=[2, -4; 2, 5; 3, 2; 4, 2] 5. Q=[1, 2, 3] |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.