Петербургский Государственный Университет
Путей Сообщения
Кафедра «Автоматика и телемеханика на железных дорогах»
Курсовой проект
По дисциплине «Каналообразующие устройства»
РАЗРАБОТКА ФУНКЦИОНАЛЬНЫХ УЗЛОВ ПО ЗАДАННЫМ ХАРАКТЕРИСТИКАМ СИСТЕМЫ ТЕЛЕМЕХАНИКИ
Выполнил:
Ст. гр. АТ-511
Любушкин А.В.
Проверил:
г.Санкт-Петербург
2010г.
Цель курсовой работы: практическое использование теоретических положений по принципам построения систем телемеханики, составляющим основу любой диспетчерской централизации объектов ЭЦ и АБ.
1 ИСХОДНЫЕ ДАННЫЕ
Структура сети и тип системы – линейная;
Число контролируемых пунктов – 25;
Число контролируемых объектов на КП – 100;
Вероятность одиночной ошибки в канале связи – Рош =2*10-3;
Вероятность ошибки в приеме команды в целом – Рк =10-8;
Разрабатываемый узел системы ТМ – дешифратор импульсных признаков амплитуды.
2 СТРУКТУРА ЛИНЕЙНЫХ СИГНАЛОВ И ПРАВИЛА ИХ ПЕРЕДАЧИ МЕЖДУ УПРАВЛЯЮЩИМ И КОТРОЛИРУЕМЫМИ ПУНКТАМИ
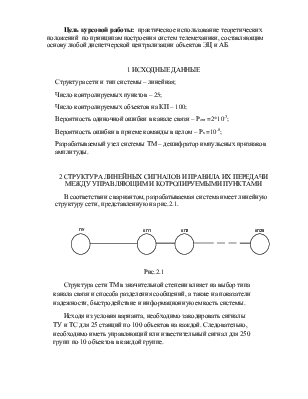
В соответствии с вариантом, разрабатываемая система имеет линейную структуру сети, представленную на рис.2.1.

Рис.2.1
Структура сети ТМ в значительной степени влияет на выбор типа канала связи и способа разделения сообщений, а также на показатели надежности, быстродействие и информационную емкость системы.
Исходя из условия варианта, необходимо закодировать сигналы ТУ и ТС для 25 станций по 100 объектов на каждой. Следовательно, необходимо иметь управляющий или известительный сигнал для 250 групп по 10 объектов в каждой группе.
Для обеспечения необходимых условий рассчитаем емкость системы.
Для управляющего приказа:
![]() =330 –
избирательная часть,
=330 –
избирательная часть,
![]() =10 –
исполнительная часть.
=10 –
исполнительная часть.
Таким образом, каждый приказ состоит из 22 импульсов. Нулевой импульс служит для приведения устройств принимающей стороны в состояние готовности к приему приказа. Импульсы 1…11 составляют избирательную часть приказа и служат для определения группы объектов. Импульсы 12…21 – исполнительные. Они определяют объект в группе, для которого передается управляющий приказ, или отображают состояние объектов группы при передаче известительного приказа.
В избирательной части управляющего приказа активными могут быть 4 импульса из 11. Таким образом, управляющий приказ может быть адресован 330 группам по 10 объектов. В этом случае емкость системы по управлению составляет 3300 объектов. Поскольку каждый управляющий приказ передается только для одного объекта, в исполнительной части управляющего приказа может быть только один активный импульс.
В исполнительной части известительного приказа активными могут быть любое количество импульсов.
Пример приказа для данной системы приведен на рис.2.2.
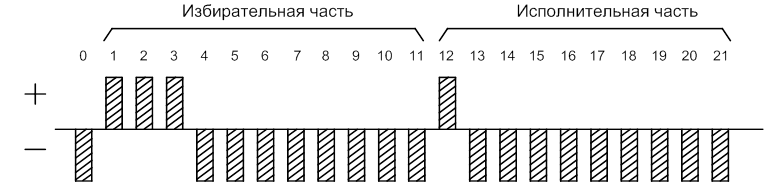
Рис.2.2
3 ФУНКЦИОНАЛЬНАЯ СТРУКТУРА СИСТЕМЫ ТЕЛЕМЕХАНИКИ
От КП к ПУ поступает сигнал ТС (телесигнализации) от первичных датчиков контролируемого процесса. ПУ посылает на КП сигнал ТУ, который управляет объектами.
Для передачи телемеханической информации используем световодные линии связи. В качестве канала связи, в данном случае, применяется волоконно-оптический кабель (многомодовый или одномодовый – в зависимости от расстояния между станциями).
Так как система имеет линейную структуру, для приема и передачи телемеханических сообщений целесообразно использовать кодовое разделение сообщений с временным разделением сигналов. В этом случае по общей физической цепи передаются последовательно во времени N комбинаций из n элементов с общими импульсными признаками.
Реализация временного разделения сигналов предполагает выделение каждому двухпозиционному объекту определенного интервала времени, в течение которого можно передать по общей линии связи сигнал. Число передаваемых двоичных сообщений в таких системах соответствует числу временных каналов (рабочих позиций распределителя).
В данной системе используем синхронно-циклический способ телепередачи, при котором сообщения передаются периодически в заданной последовательности, независимо от того, содержат они или не содержат новую информацию. Достоинством данного способа передачи является исключение длительных потерь информации из-за ошибок в приеме. Выбор обусловлен отсутствием необходимости применять спорадический режим работы распределителей, при котором приходится использовать в структуре дополнительный узел по выявлению изменений.
Структурная схема данной системы представлена на рис.3.1. Указанная структура системы предполагает циклическую работу распределителей. В этом случае изменения в состоянии источника сообщений отражаются в каждом цикле.
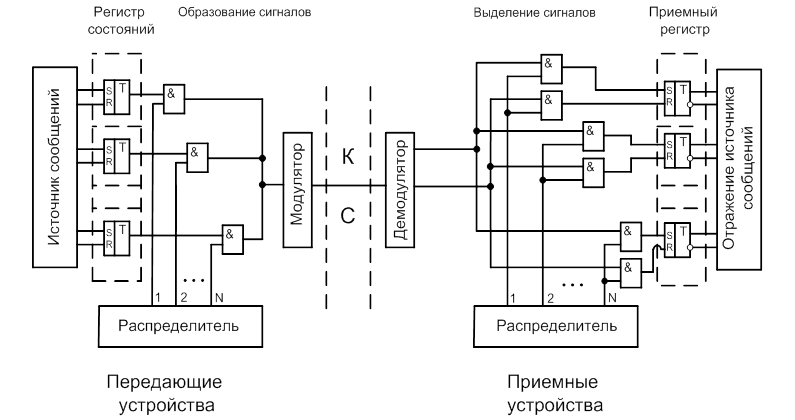
Рис.3.1
В данной системе используется дешифратор импульсных признаков, обеспечивающий преобразование линейных сигналов на входе демодулятора в дискретные и их запоминание для дальнейшего использования. Функциональное содержание декодера при последовательной обработке линейного сигнала отражено на рис.3.2.
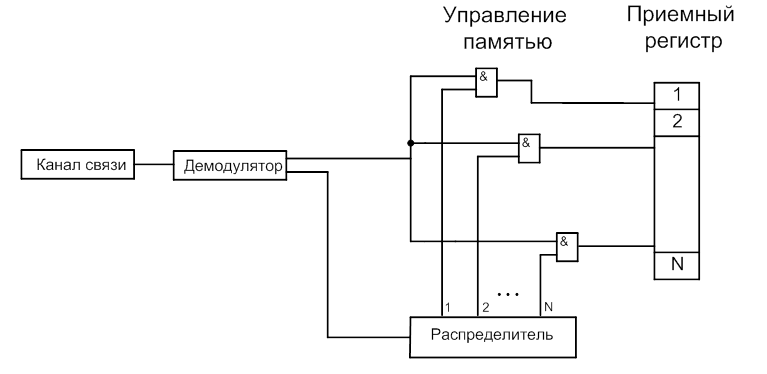
Рис.3.2
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.