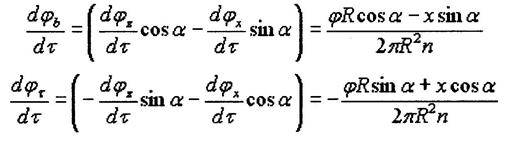
Где х и φ – удлинение и угол закручивания все пружины, n – число витков, l=πR – длина проволоки половины витка.
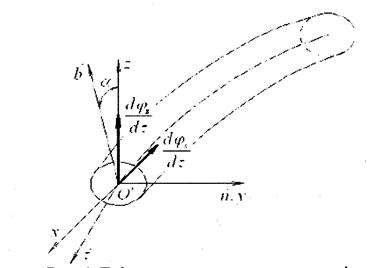 |
Рис. 4. Деформации элемента проволоки dτ.
Потенциальная энергия пружины равна:
U=Uk+Uu (5)
где Uk - потенциальная энергия кручения, Uu - потенциальная энергия изгиба. Выражения для Uk и Uu имеют вид :
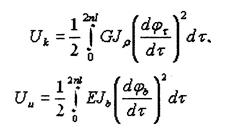
(6)
 где G - модуль
упругости материала проволоки при сдвиге, Е - модуль упругости материала
проволоки при растяжении,
где G - модуль
упругости материала проволоки при сдвиге, Е - модуль упругости материала
проволоки при растяжении,
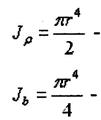
полярный момент инерции сечения проволоки,
осевой момент инерции сечения проволоки.
 - относительный угол
закручивания,
- относительный угол
закручивания,
- относительный угол изгиба.
 |
(7) 
(8)
Подставим (7) и (8) в (6)
и найдем потенциальную энергию: 
(9)
Отсюда потенциальная энергия деформированной пружины равна:
 (10)
(10)
Элементарные преобразования в (10) дают окончательное выражение для потенциальной энергии:
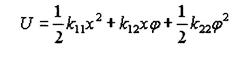 (11)
(11)
где к11, к12, к22 - коэффициенты жесткости системы.
Коэффициент к12 отличен от нуля, поэтому существует связь между колебаниями системы по координатам х и φ .
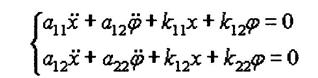 Подставляя (2) и (11)
в (1), получаем систему уравнений свободных колебаний маятника в общем виде:
Подставляя (2) и (11)
в (1), получаем систему уравнений свободных колебаний маятника в общем виде:
(12)
В полученной системе (12) коэффициенты инерции и жесткости постоянные величины (не учтена зависимость R и α от х и φ) и в слагаемые не входят произведения координат. Поэтому система является линейной.
С помощью полученной системы (12) можно решить задачу нахождения закона движения маятника для заданных начальных условий или только найти частоты главных колебаний.
Предположим, что движение, описываемое уравнениями (12), является гармоническим, и будем искать частные решения системы в тригонометрической форме:
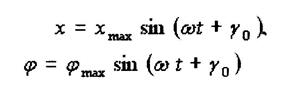
(13)
где χмах, φмах, ω и γ0 - постоянные величины.
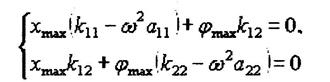 Подставляя (13) в
уравнения (12), придем к системе вида:
Подставляя (13) в
уравнения (12), придем к системе вида:
(14)
Уравнения (14) являются линейными однородными уравнениями относительно χмах и φмах. Решение этих уравнений отлично от нуля, если определитель, составленный из коэффициентов при χмах, φмах, будет равен нулю:
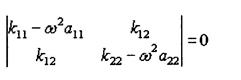 (15)
(15)
Соотношение (15) есть квадратное уравнение относительно ω2. Оно носит название характеристического уравнения или уравнения частот. Найдем с его помощью частоты колебаний:
![]()
Решение этого биквадратного уравнения известно:
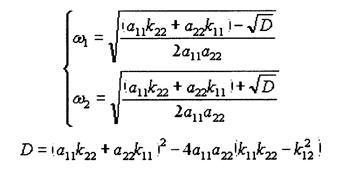 (16)
(16)
(17)
Частоты ω1 и ω2 найденные из (16) и (17) называются главными.
Частотам ω1
и ω2 соответствуют колебания вида (13). Таким
образом, по каждой координате происходят колебания с амплитудами: ![]() (верхний индекс показывает
номер главного колебания, в котором берется амплитуда). Результирующее общее
движение будет их суммой:
(верхний индекс показывает
номер главного колебания, в котором берется амплитуда). Результирующее общее
движение будет их суммой:
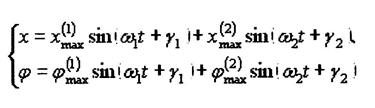
(18)
Из системы (14) можно
найти соотношения амплитуд ![]() и
и
![]() , а еще недостающие
параметры, например
, а еще недостающие
параметры, например ![]() ,
находятся из начальных условий для системы (12).
,
находятся из начальных условий для системы (12).
Рассмотрим случай свободных колебаний системы, когда частоты главных колебаний ω1 и ω2 очень мало отличаются друг от друга, то есть:
![]() (19)
(19)
![]() Обозначим ξ -
разность аргументов синусов в общем решении (18):
Обозначим ξ -
разность аргументов синусов в общем решении (18):
(20)
 При t=0
величина ξ(0)=γ2-γ1, а с возрастанием t эта
разность из-за малости ω1 - ω2 увеличивается
очень медленно. Тогда:
При t=0
величина ξ(0)=γ2-γ1, а с возрастанием t эта
разность из-за малости ω1 - ω2 увеличивается
очень медленно. Тогда:
(21)
Подставим это выражение в общее решение (18):

(22)
Для другой координаты аналогично:
 (23)
(23)
Введем обозначения:
 (24)
(24)
Тогда уравнения (18)
после преобразований примут вид:![]()
 (25)
(25)
,где
Так как в выражениях для С1, С2, θ1 и θ2 входят sinξ и cosξ а величина ξ медленно изменяется с течением времени, то рассматриваемые колебания (18) не являются гармоническими. Период изменения амплитуд С1, С2, в этом случае значительно больше периода колебаний. Это явление и называется биениями.
Найдем соотношения параметров системы, при которых возникают биения. Явление биений возникает при выполнении условий (19). Можно записать для одной из частот, например ω2, эквивалентное соотношению (19) условие:
(26)
(27)
Возведем обе части выражения (27) в квадрат:
Отсюда следует, что:
![]() (28)
(28)
Полученное неравенство (28) выражает необходимое условие существования биений. То есть выполнение этого условия не всегда приводит к появлению биений в движении системы.
 |
Отсюда вытекает еще одно необходимое условие существования биений:
 (29)
(29)
Оно требует выполнения определенного соотношения между параметрами системы. Условия (28) и (29) совместно определяют наличие биений.
Оценим условие (28) для малых углов α, при этом, очевидно, sinα≈α, sin2α≈α, cosα≈1, cos2α≈1:
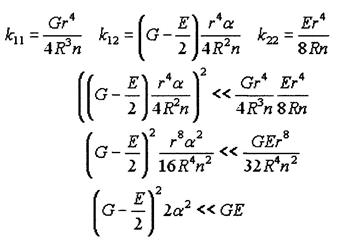 (30)
(30)
(31)
Неравенство (31) справедливо при малых углах α. Можно сделать вывод, что условие (28) также выполняется, когда пружина удовлетворяет уже упомянутым условиям: r << R, угол α мал. Поэтому определяющим будет соотношение (29).
Коэффициенты к11 и к22 из (30) совпадают с коэффициентами жесткости пружины.
Полученные выражения для коэффициентов инерции и жесткости дают возможность оценить величины собственных частот.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.