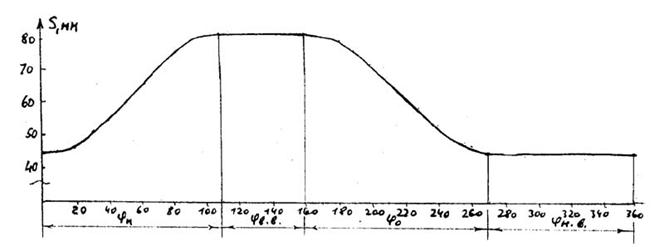
ДИАГРАММА ПЕРЕМЕЩЕНИЯ ТОЛКАТЕЛЯ
2.2. РАСЧЕТ И ПОСТРОЕНИЕ ПРОФИЛЯ КУЛАЧКА С КАЧАЮЩИМСЯ ДВИЖЕНИЕМ КОРОМЫСЛА ТИП I
а) Кинематическая схема кулачкового механизма с коромыслом
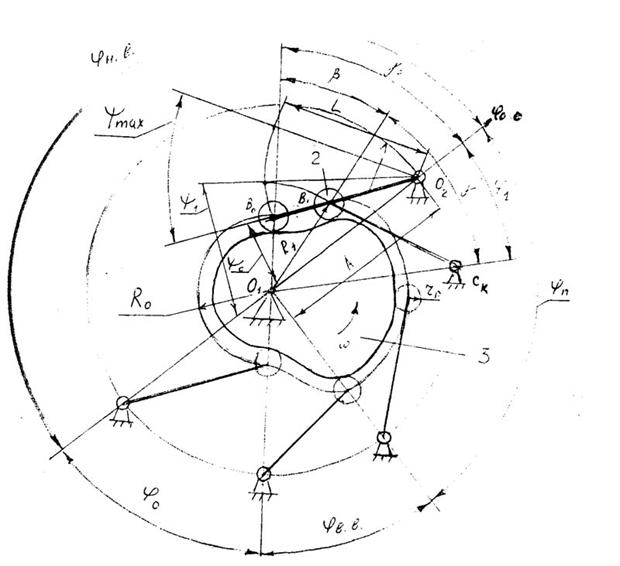
Рис. 2.2. Кулачковый механизм с качающимся движением коромысла тип I
1 - коромысло; 2 - ролик; 3 – кулачок
Полярный угол b определяется из условия
![]()
где: ![]() ;
; ![]()
В формуле 4 берется знак плюс, если фаза подъема направления вращения кулачка и коромысла противоположные, и знак минус, если эти направления одинаковы.
rp - радиус ролика коромысла;
y0=20° - начальный угол колебания;
jn - угол подъема;
jв.в. - угол верхнего выстоя;
jо - угол опускания;
jн.в.- угол нижнего выстоя;
R0 - радиус окружности начального положения ролика;
L – длина коромысла;
А – расстояние между центрами вращения кулачка и оси коромысла;
ymax - угол размаха коромысла;
Численное значение A, L, y принимается по табл. 1, jn; jв.в.; jо; jн.в.
Радиус окружности начального положения центра ролика определяется расчетом
![]()
По исходным данным, закону движения коромысла с циклограммой производится расчет центра ролика до центра коромысла за полный оборот кулачка (360°) через каждые ji = 10°.
Результаты расчета диаграммы перемещения коромысла заносятся в таблицу 5 и строится диаграмма перемещения коромысла.
ПРИМЕР:
Построение профиля. кулачка с катающимся коромыслом тип I по данным варианта № 1
1. По табл. 1 принимаем А = 75 мм; L = 40 им ; y=30°. По табл. 2 определяем закон движения коромысла:
- для подъема 
- для опускания 
3. По табл. 3 принимаем фазовые углы jn=110°; jо=110°, jв.в.= 50°, jн.в.= 90°
4. Определяем, расчетом
![]()
5. По закону движения коромысла
производим расчет положения центра ролика yi через каждые ji = 10° поворота кулачка в пределах задаваемых углов jn; jв.в.; jо; jн.в начинаем с нулевого угла j0-0 = 0. Начальное положение коромысла, т.е. начало отсчета поворота кулачка j0-0 = 0. определяется как пересечение R0 и L при j=20°.
5.1. Определяв положение центра ролика при подъеме в пределах jn=110° через каждые ji = 10° точках: R1; R2; …; R11

![]()
5.2 Определяем положение центра ролика при верхнем выстое, в пределах jв.в.= 50°, т.е. в точках 12…16, R12; R13; …; R16
т.е. максимальное положение центра ролика при подъеме равно положению ролика при верхнем выстое.
5.3. Определяв положение центра ролика при опускании в пределах jо=110°, через каждые ji = 10° в точках 17…27; R17; R18; …; R27

Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.