







Санкт–Петербургский Государственный
Электротехнический Университет
«ЛЭТИ»
Кафедра РС
«Цифровые и микропроцессорные устройства»
«Контроллер имитатора поверхностного сигнала»
Код задания:279
Выполнил: Иванова Ю.С.
Группа: 5123
Преподаватель: Смирнов Б.И.
Санкт–Петербург
2008 г.
Индикаторное табло имитатора… …………………………………………………..………..8
Текст программы……………………………………………………………………………….12
Введение
Импульсно-фазовая система дальней навигации (LOng RAng Navigation) первоначально разрабатывалась в США для целей проводки морских конвоев в годы второй мировой войны. Первая модель системы “Lоrаn-А”, которая излучала импульсный сигнал в СВ-диапазоне, использовалась до 60-х гг., затем ее сменила система “Lоrаn-С”, которая работает с фазоманипулированным сигналом в ДВ-диапазоне. Система “Lоrаn” разработана в США,в СССР была создана и эксплуатируется в настоящее время аналогичная система «Тропик».
Радионавигационная система (РНС) “Loran-С” используется и на суше и на море, но наилучшие результаты по точности и дальности действия имеет на море, поэтому наибольшее распространение она нашла в судоходстве, хотя известны примеры использования системы в авиации, автомобильном транспорте, в геофизике, метеорологии и др. Массовые разработки в области РНС типа “Loran-С” приходятся на 60-е гг. В настоящее время происходит эксплуатация весьма обширного парка существующего бортовой аппаратуры.
Предполагается, что систему “Loran-С” в дальнейшем заменят системы спутниковой навигации. Подобные системы, развернутые в настоящее время США (GPS NAVSTAR) и Россией (GLONASS), вобрали в себя наиболее продвинутые достижения современной технологии.
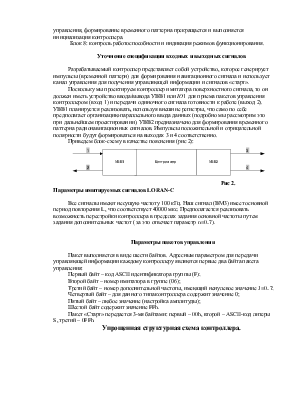
Принцип действия РНС основан на измерении в точке приема (на судне) промежутка времени между моментами прихода импульсных сигналов, посылаемых тремя береговыми станциями, одна из которых является ведущей (ВЩ Master), другие станции X, У, Z, W — ведомыми (ВМ, Slave). Ведущая станция обеспечивает синхронизацию цепочки на фиксированной частоте повторения, например SL3. Ведомые станции излучают сигнал на той же частоте повторения, но с фиксированной задержкой относительно сигнала ведущей станции. Разности расстояний от местоположения судна до радиостанции М, Y и М, W легко найти, если измерить промежуток времени между моментами прихода импульсных сигналов;
δDI= D2 – D1=υ(t2 – t1)=γTγ ; δD2= D3 – D1=υ(t3 – t1)=γTw ;
где I — скорость распространения радиоволн. Геометрическое место точек, имеющее постоянную разность t2 – t1 или t3 – t1 относительно двух точек, в которых расположены излучающие станции (фокусы), определяет линию положения на плоскости — гиперболу. Наличие двух пересекающихся гипербол позволяет получить точку или однозначно определить местоположение судна на поверхности.
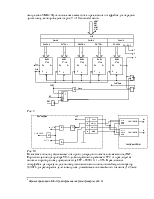
В РНС “Loran-С” сигнал излучается в виде пачки из 8 радиоимпульсов. Для различения сигналы ведущей и ведомой станций кодируются с использованием бинарного кода Франка, обладающего хорошей различимостью (хорошей взаимно корреляционной функцией). Кодирование сигналов — фазовое, означающее при бинарном коде, что начальная фаза сигнала в зависимости от компонентов кода может принимать значение 0 (кодовое значение “+1”) или π (кодовое значение “-1”). Такое кодирование связано с использованием на станциях генераторов ударного возбуждения для формирования радиоимпульсов. При этом код “0” может формироваться импульсом (дельта-импульсом) положительной полярности (+1), а код π — импульсом отрицательной полярности (-1).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.