Основная задача автоматизации рукавных фильтров: создание наиболее благоприятных условий для протекания процесса фильтрации.
Основная задача автоматизации делят на несколько частных задач: управление температурным режимом фильтра, процессом регенерации ткани, выгрузкой уловленной пыли.
Автоматическое управление режимом работы систем регенерации рукавных фильтров производиться с помощью системы механического встряхивания. Механическое воздействие на рукав осуществляется через исполнительный механизм. Для скручивания рукава применяют цепной исполнительный механизм , для горизонтального перемещения – кривошипно – шатунный , для сжатия и подтягивания тканей – кривошипно – шатунный – кулачковый , для вибрации – инерционный и ударный механизмы . Еще для регенерации используют обратную продувку воздухом.
Наиболее эффективная - комбинированная система - обратная продувка со встряхиванием. Но их недостаток – надо выключать секции при регенерации. Поэтому часто используется импульсная регенерация, которая осуществляется при работающем фильтре.
АСР температуры предполагает: обоснование предела регулирования, выбор представительной точки контроля, типа датчика температуры , регулятора и регулирующего органа. Датчики температуры чаще ТСП. Регуляторы: электрические и пневматические. Тип ИМ зависит от типа регулятора.
Например, регулирование температуры газа на входе газоочистной установки можно осуществить путем добавления к отходящим газам установки холодного воздуха. Для этого на трубопроводе устанавливают регулирующий дроссель.
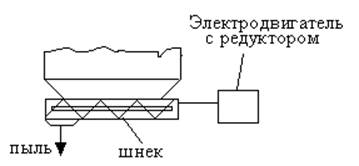
Например шнековая выгрузка пыли применяется для регулирования уровня пыли в бункере, работающем под разрежением более 1000 ПА:
Для нестационарных условий работы рекомендуются замкнутые узлы регулирования уровня, используются позиционные регуляторы (например сверхвысокочастотные и радиоизотопные, позволяющие измерять и регулировать уровень в исключительно сложных условиях).
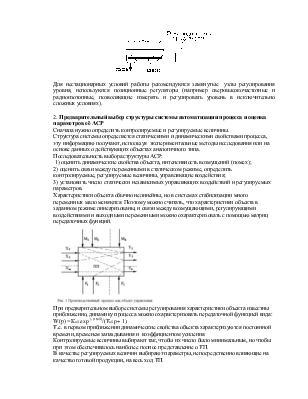
2. Предварительный выбор структуры системы автоматизации процесса и оценка параметров её АСР
Сначала нужно определить контролируемые и регулируемые величины.
Структура системы определяется статическими и динамическими свойствами процесса, эту информацию получают, используя экспериментальные методы исследования или на основе данных о действующих объектах аналогичного типа.
Последовательность выбора структуры АСР:
1) оценить динамические свойства объекта, интенсивность возмущений (помех);
2) оценить связи между переменными в статическом режиме, определить контролируемые, регулируемые величины, управляющие воздействия
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.