



Лекция 6.
1. Типовые алгоритмы цифровых регуляторов.
2.
Расчет оптимальных настроек цифровых
регуляторов .
3. Дискретный и непрерывный методы.
Синтез типовых алгоритмов цифровых регуляторов
При малом периоде квантования ts цифровые регуляторы можно заменить их непрерывными аналогами и вести расчет параметров настроек обычными методами. ТАУ показывает, что в этом случае АЦП - дельта-импульсный модулятор - можно заменить непрерывным безинерционным звеном с Кп = 1/ ts
ПФ непрерывного регулятора, эквивалентного
дискретному регулятору
с ПФ Wр(z),
имеет вид:
Задавшись желаемой ПФ непрерывного регулятора Wр.ж(s) » Wр.ж(s,z),можно найти ПФ цифрового регулятора
![]()
Если ЦАП использует фиксатор нулевого порядка ZOH с Z-ПФ и S-ПФ
![]()
![]()
![]()
то ПФ регулятора равна:
 (19)
(19)
И-алгоритм
Непрерывный алгоритм его работы точно реализуется цифровым регулятором, так как при
![]()
![]() (20)
(20)
П-алгоритм
Желаемая ПФ П-регулятора
![]()
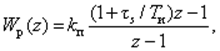
ДПФ П-регулятора с учетом (19)
![]()
Так как ПФ цифровых дифференциаторов обратны ПФ цифровых интеграторов, с учетом формул (16) и (17) перехода к ДПФ (от sк z) для П-регулятора имеем:
 (21)
(21)
Из (19) непрерывные ПФ для них
 (22)
(22)
ПИ-алгоритм
Реализуется суммированием ДПФ цифровых И- и П-регуляторов или
 (23)
(23)
где Ти = kп / kи.
 (24)
(24)
ПИД-алгоритм
Желаемая ПФ регулятора такова
![]()
где kд = kп Тд.
С учетом (19) ДПФ регулятора равна
 (25)
(25)
Непрерывная ПФ цифрового ПИД-регулятора равна
 (26)
(26)
Расчет оптимальных настроек цифровых регуляторов
В режиме получения достаточно полной информации об изменении регулируемой величины расчет может осуществляться методами как теории дискретных систем, так и теории непрерывных систем.
Обычно используют графический метод определения оптимальных параметров настройки регуляторов.
Порядок построения обычный: вначале строят АФХ объекта, а затем по ней строят АФХ разомкнутой СУ. При этом учитывают модуль составляющих (П-, И-, Д-) закона управления и угол их поворота относительно исходного вектора АФХ объекта.
Дискретный метод
1. Задаваясь значениями частоты ω строят АФХ дискретного ОУ по его непрерывной ПФ.
2. По ДПФ регулятора находят выражения для составляющих закона регулирования, по ним вычисляют значения АФХ регулятора для частот ω .
3. Прибавляя вектора составляющих закона регулирования, строят АФХ разомкнутой СУ для частот ω .
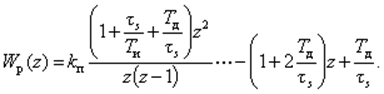
Согласно (23), АФХ ПИ-регулятора
 (27)
(27)
В существенном для расчета диапазоне частот от 0 до 3/4 π выражение (27) можно упростить:
 (28)
(28)
Отличие от аналогового ПИ-регулятора – в увеличении модуля П-составляющей на ts / 2Tи .
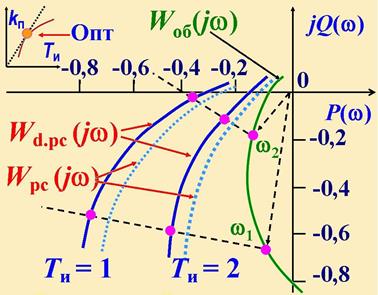
Таким образом, цифровой регулятор обеспечивает меньший запас устойчивости, чем непрерывный.
Дальнейший расчет оптимальных параметров настройки аналогичен расчету непрерывных регуляторов:
- проводят луч под углом γ (по М);
- строят окружности и находят r , kп;
- для нескольких kп, Ти, а затем и Тд находят оптимальные параметры настройки регулятора.
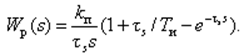
Непрерывный метод
В нем вместо ДПФ цифрового регулятора Wр(z)используется ПФ эквивалентного непрерывного регулятора Wр(s).
Для ПИ-регулятора согласно формул (23) и (19) ПФ имеет вид:
После преобразований имеем
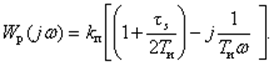
Тогда АФХ непрерывного эквивалентного ПИ-регулятора
 (29)
(29)
Таким образом, отличие от расчета аналогового ПИ-регулятора состоит в том, что длина отрезков П- и И- составляющих АФХ разомкнутой системы определяют по более сложному закону:

И- составляющая
Расчет оптимальных параметров настройки цифровых регуляторов методами теории дискретных систем имеет более универсальный характер и может применяться всегда.
Расчет методами теории непрерывных систем возможен лишь при отсутствии пульсаций квантования, т.е. лишь при большой частоте квантования (малом ts), но он более прост.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.