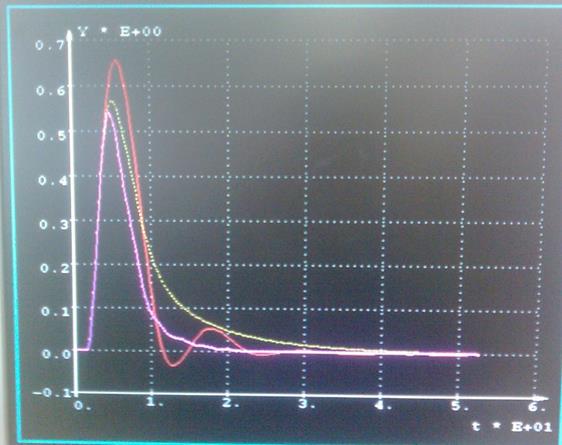
Рисунок 21–Переходные процессы: САР без предиктора (красный); с предиктором первого порядка (жёлтый); с оптимальными параметрами регулятора (фиолетовый)
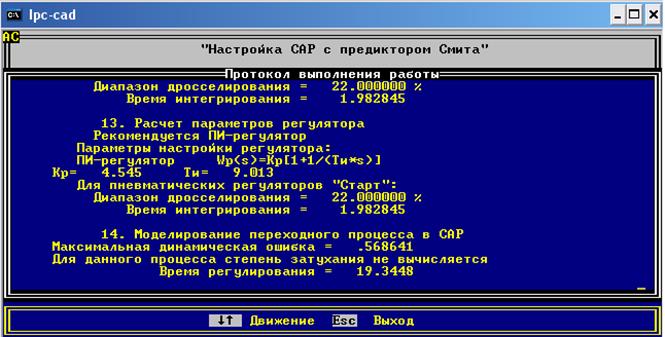
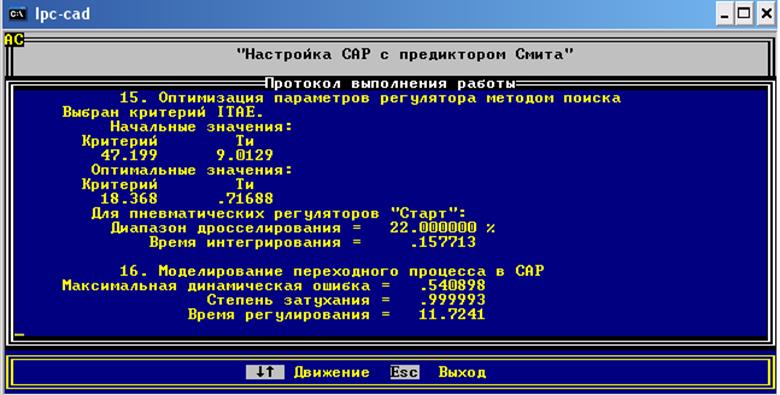
Переходной процесс в САР с предиктором и оптимизированными параметрами, показанный на рисунке 21 имеет следующие показатели качества:
максимальная динамическая ошибка = 0.540898;
степень затухания = 0.999993;
время регулирования = 11.7241;
Переходной процесс в САР с предиктором и оптимизированными параметрами имеет более качественные показатели чем 2 других переходных процесса на рисунке 21, в частности время регулирование на 8с меньше чем в САР с предиктором и исходными параметрами.
Выберем пункт меню “Вывод протокола на экран” и просмотрим содержимое протокола.
Проверим результаты расчета САР в программе VisSim. Введем параметры своей модели в блок «объект» и проведем моделирование переходного процесса в САР при возмущении по нагрузке (рисунок 22).
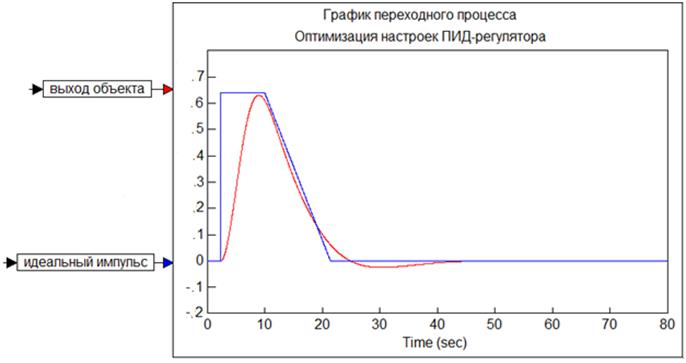
Рисунок 22 – График переходного процесса в САР с оптимальными настройками регулятора построенный в VisSim
Исследование комбинированной САР
1. Выберем последовательно пункты меню: “ Комбинированная САР”, “Задание характеристик канала управления ”, “Передаточная функция ”, “Ввод передаточной функции с клавиатуры”.
2. Введём параметры передаточной функции канала управления в соответствии с заданием преподавателя по таблице 2.
3. Выберем последовательно пункты меню: “ Комбинированная САР”, “Задание характеристик канала возмущения”, “Передаточная функция ”, “Ввод передаточной функции с клавиатуры”.
4. Введём параметры передаточной функции канала возмущения в соответствии с заданием преподавателя по таблице 2.
5. В IP-CAD выберем пункт меню “Вывод передаточных функций объекта на экран”, проверим правильность задания передаточных функций объекта (рисунок 23 ).
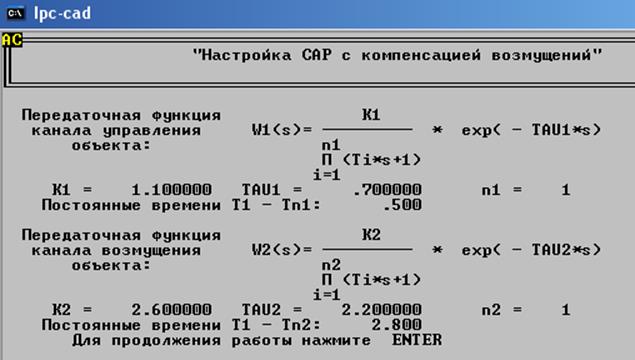
Рисунок 23 – Передаточные функций канала управления и канала возмущения
6. Выберем пункт меню “Экспресс-наладка САР (рисунок 24).
Рисунок 24 – Экспресс-наладка САР\
В результате получаем график с изображением переходных процессов САР без компенсатора, САР с компенсатором (рисунок 25).
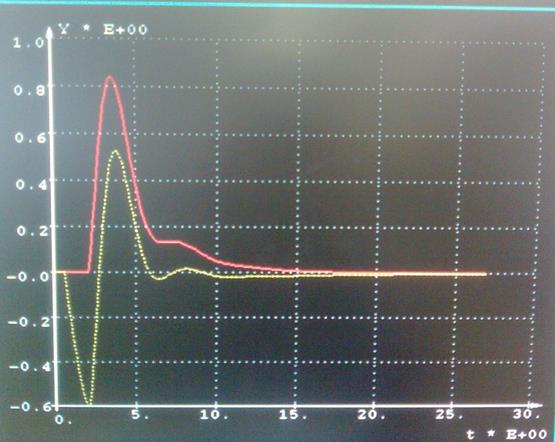
Рисунок 25 –Переходные процессы: САР без компенсатора (красный); САР с компенсатором (жёлтый)
При введении компенсатора в САР время регулирования уменьшилось, динамическое отклонение уменьшилось.
После вывода на экран переходных процессов на экран выводятся передаточные функции регулятора и компенсатора (рисунок 26).
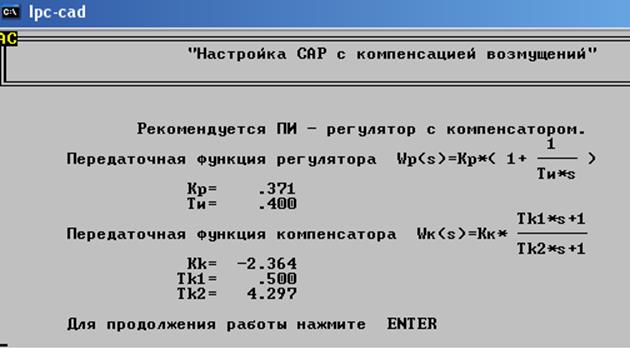
Рисунок 26 – Передаточные функции регулятора и компенсатора
7. Выберем последовательно пункты меню “Настройка регулятора”, “Расчет параметров регулятора”. Затем выберем рекомендованный программой тип регулятора, выберем вид процесса “Колебательный (рисунок 27).
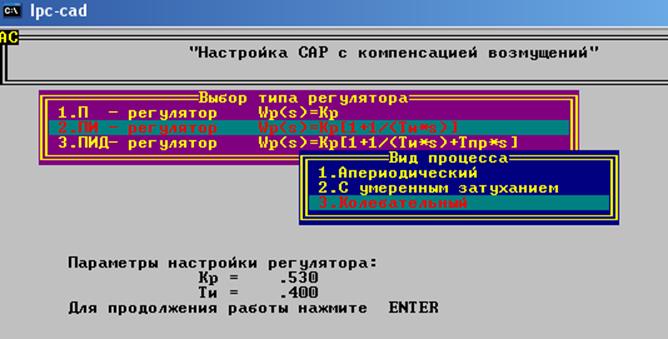
Рисунок 27 – Расчет параметров регулятора
8. В режиме“Настройка регулятора” выберем пункт меню “Выбор внешних воздействий”, затем вид внешнего воздействия “Возмущение на входе объекта (по нагрузке)”, вид воздействия “Скачок”.
9. Выберем пункт меню “Моделирование переходного процесса в САР” и получим график переходного процесса на выходе САР (рисунок 28).
Рисунок 28 – Моделирование переходного процесса в САР
После чего получаем график переходного процесса САР при ступенчатом возмущении по нагрузке (рисунок 29).
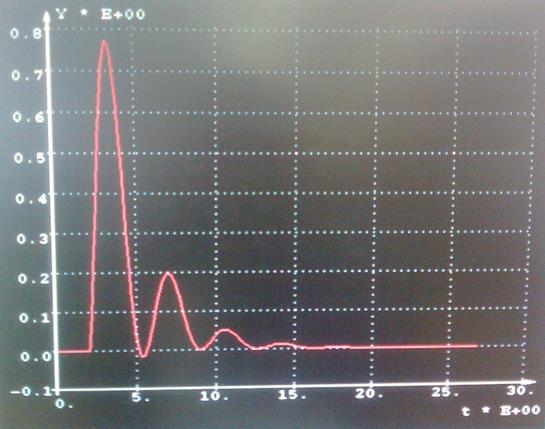
Рисунок 29 – График переходного процесса САР при ступенчатом возмущении по нагрузке
Переходной процесс показанный на рисунке 29 имеет следующие показатели качества:
максимальная динамическая ошибка = 0.771866;
степень затухания = 0.741260;
время регулирования = 8.30278.
10. Проведем проверку САР на грубость. Для этого выберем пункт меню “Проверка САР на грубость”, и получим график переходного процесса на выходе САР (рисунок 30,31).
Рисунок 30 – Проверка САР на грубость
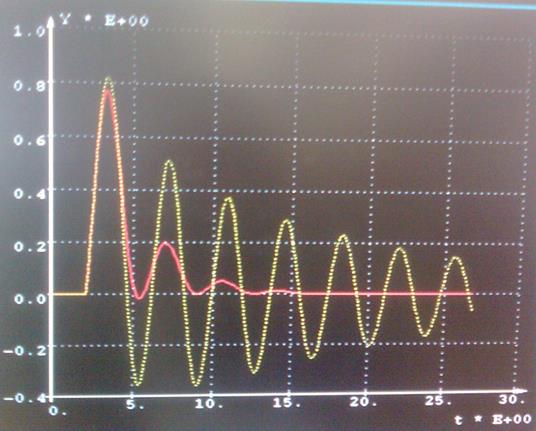
Рисунок 31 – Переходные процессы в САР до и после 20%-го изменения коэффициента усиления и запаздывания
Переходной процесс с увеличенными на 20% параметрами, показанный на рисунке 31 имеет следующие показатели качества:
максимальная динамическая ошибка = 0.824522;
степень затухания = 0.373896;
перерегулирование
𝜎% = ![]()
По графикам на рисунке 13 можно сделать вывод, что в результате увеличения значений параметров на 20% все показатели качества значительно ухудшаются.
11. Найдем оптимальные параметры регулятора методом поиска. Варьируемые параметры: Кр и Ти. Критерий оптимальности ITAE.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.