Двухчастотная фазовая аппаратура фирмы Trimble, которая также может работать и с новой системой SkyFix Premier, обеспечивающей повышенную точность определения координат
Наиболее оптимальным решением является использование
SkyFix оборудование совместно со специализированным гидрографическим программным
Обеспечение фирмы Quality Positioning Services (QPS) – QINSy v.7
Программное обеспечение QINSy позволяет выполнять комплексную обработку данных спутникового позиционирования с учетом точности дифференциальных поправок, выдаваемых различными дифференциальными станциями SkyFix. В результате комплексной обработки данных от нескольких дифференциальных станций обеспечивается повышение точности определения координат, а также осуществляется строгая оценка точности на основе расчета элементов эллипса ошибок в реальном масштабе времени с отображением информации в графическом виде на экране компьютера.
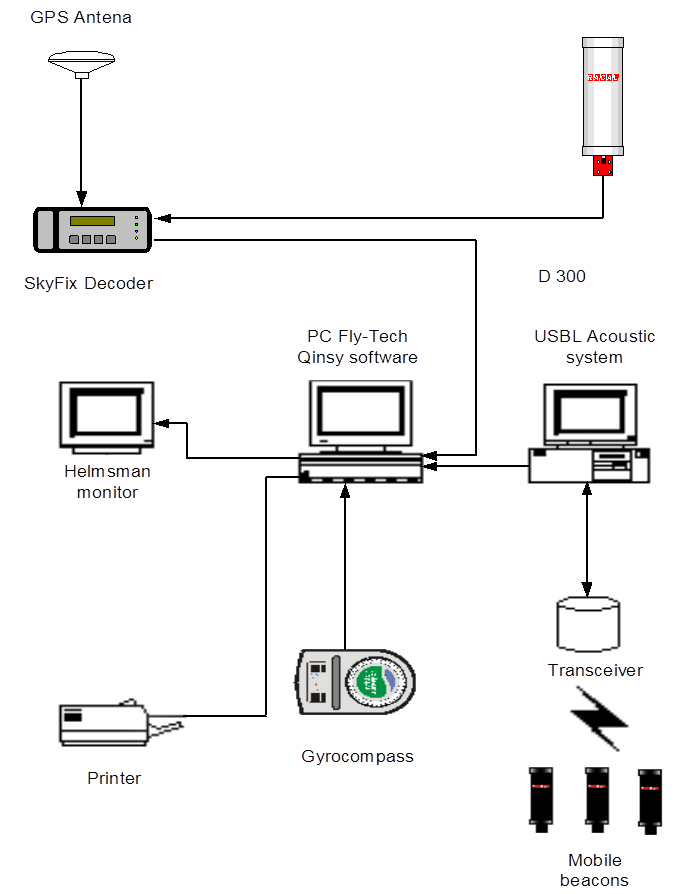
Рис.8. Схема подключения бортового оборудования при совместном использовании
Спутниковой аппаратуры SkyFix 90938 – Mk3 и гидроакустической системы с
ультрокороткой базой.(USBL Acoustic system)
Для обеспечения высокоточных работ на морских нефтегазовых месторождениях на значительных удалениях от берега использование дифференциальной спутниковой подсистемы
является необходимым условием успешного выполнения работ. Однако, высокая точности позиционирования с помощью спутниковой подсистемы SkyFix для работ с донным оборудованием при глубинах моря более 50 м. бывает недостаточно. Требуется использовать гидроакустическую систему с ультракороткой базой, чтобы определить положение подводного технического средства (ПТС) относительно судна. При этом используется сложный комплекс оборудования, изображенный на рис.8. . Перед началом работ все оборудование должно быть собранно, сопряжено и проверенно – протестировано с помощью программного обеспечения.
Для определения относительного положения «судна-ПТС» под водой используется гидроакустическая навигационная система (ГНС) HIPAP USBL фирмы Simrad, установленная стационарно на судне. Для регистрации данных и последующей обработке использовался пакет программ QINSy 7.0 .
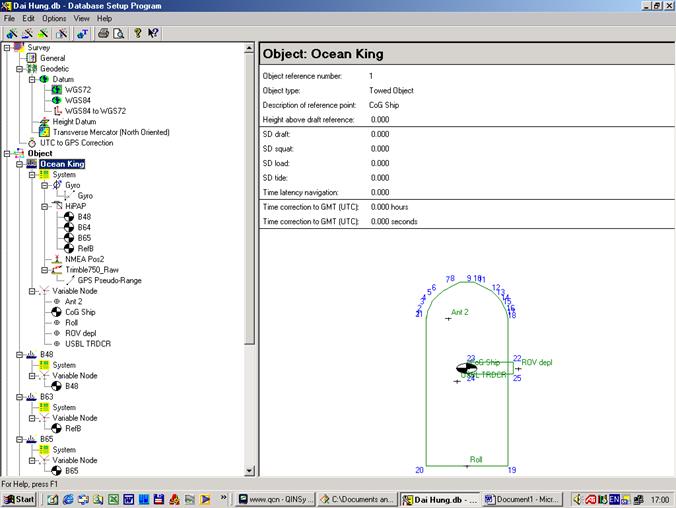
Рис. 8. Интерфейс пользователя программного обеспечения QINSy
На судне были установлены DGPS SkyFix 90938 – Mk3 и SkyFix Spot антенны, измерены координаты антенн СНА и ГНС (офсеты) и введены в пакет программ QINSy. На ПТС установлены маяки-ответчики. Схема подключения всего оборудования приведена на рис. 8.
В качестве основной системы позиционирования использовалась система SkyFix. Из приёмника-декодера SkyFix 90938 в виде сообщений NMEA-183 GGA поступала информация о координатах в QINSy 7.0. Одновременно с этим в QINSy поступала информация о курсе судна и позиция ПТС, вычисленная ГАС HIPAP USBL относительно положения судна.
Отличительной особенностью выполнения ответственных работ на морском месторождение является требования дублирования всего навигационного оборудования.
В качестве запасного оборудования использовался приёмник Trimble 750MS, который был настроен на приём сырых псевдодальностей и последующую передачу их в ПО QINSy 7.0. Поправки в псевдодальности передавались из декодера SkyFix в формате RTCM SC-104 ver2.0 по последовательному COM порту. В QINSy 7.0 были сделаны соответствующие установки для исправления псевдодальностей.
Сбор данных и контроль.
Сбор данных и контроль точности выполняемой работы осуществлялся при помощи ПО QINSy 7.0. Все поступающие данных о позиции судна и о позиции подводных объектов записывались на ПК. Одновременно с записью производился контроль точности при помощи дисплеев Positioning System Display и ScatterPlot Display.
Первый дисплей отображает количество отслеживаемых в данный момент спутников, текущие координаты GPS антенны, элементы эллипса ошибок, возраст поправок, СКО по каждой из трёх координат, метод решения (0,1,2) и т.п.
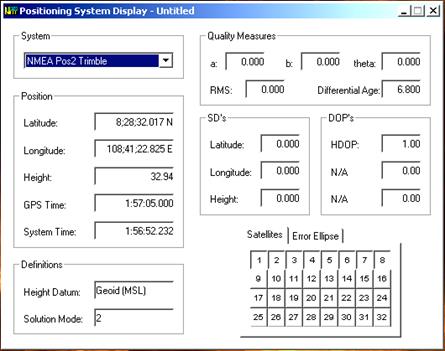
Рис.8.
Второй дисплей графически отображает информацию о текущей позиции. В правой части дисплея строиться эллипс ошибок и указываются значения большой и малой полуосей эллипса. В левой части в трёх окнах графически отображается изменение разницы между положением двух узлов, которые выбираются нами, по осям X, Y, H. Также ведётся статистика измерений: счётчик измерений, последние измерение, минимальное, максимальное и среднее значения и СКО.
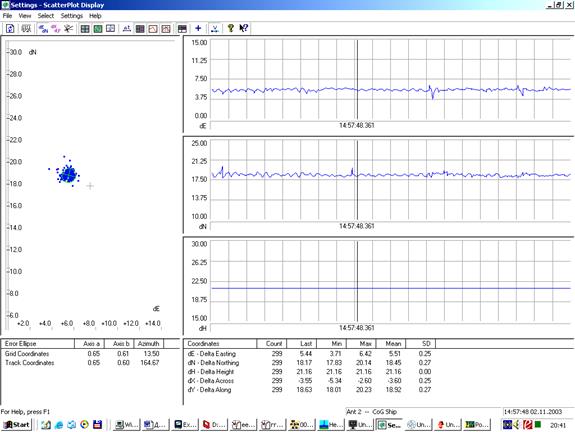
Рис.8.
Поправки в псевдодальности получались от станций SkyFix: Сингапур, Манила, Хошимин, Кота и Бангкок.
Во время производимых мною работ система функционировала стабильно, без сбоев и неполадок. Максимальная погрешность определения положения ПТС и судна не превысила 1.5 метра. Средняя погрешность определения положения ПТС и судна составила 0.8 метра.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.