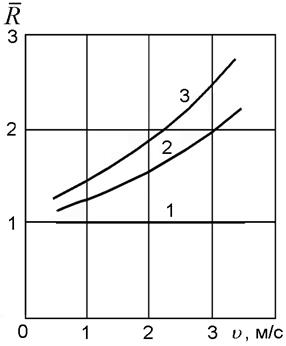
На рис. 2.5 показано относительное возрастание сопротивления
![]() движению судна при плавании на мелководье
с различными скоростями по отношению к плаванию в глубокой воде. Опытом установлено,
что влияние дна водоема начинает сказываться в тех случаях, когда отношение
глубины водоема
движению судна при плавании на мелководье
с различными скоростями по отношению к плаванию в глубокой воде. Опытом установлено,
что влияние дна водоема начинает сказываться в тех случаях, когда отношение
глубины водоема ![]() к осадке судна
к осадке судна ![]() становится менее 15. Такое соотношение
становится менее 15. Такое соотношение ![]() наблюдается при плавании в реках, озерах,
в прибрежных районах. Для морских судов характерно плавание на неограниченной
воде, т. е. при значительных глубинах и вдали от берегов. Вместе с тем по мере
роста водоизмещения судов и связанной с этим осадки отношение
наблюдается при плавании в реках, озерах,
в прибрежных районах. Для морских судов характерно плавание на неограниченной
воде, т. е. при значительных глубинах и вдали от берегов. Вместе с тем по мере
роста водоизмещения судов и связанной с этим осадки отношение ![]() может достигнуть критического значения (
может достигнуть критического значения (![]() < 15) и при морском плавании. Это
относится прежде к супертанкерам. Следует отметить, указанное выше отношение
< 15) и при морском плавании. Это
относится прежде к супертанкерам. Следует отметить, указанное выше отношение ![]() < 15 относится к условиям плавания судна
с умеренными скоростями, по мере увеличения скорости судна влияние мелководья и
узкостей может проявиться в большей степени.
< 15 относится к условиям плавания судна
с умеренными скоростями, по мере увеличения скорости судна влияние мелководья и
узкостей может проявиться в большей степени.
|
Рис. 2.5. Относительное увеличение сопротивления |
Все сказанное выше заставляет учитывать влияние условий плавания судна на распределение нагрузки на главный двигатель.
Режим траления является одним из основных установившихся
режимов работы дизельной установки траулеров и тральщиков. Он характеризуется
наличием дополнительного сопротивления, создаваемого тралом, которое может в 8÷12
раз превышать сопротивление корпуса судна. В связи с этим, а также по соображениям
прочности троса и мощности лебедки, буксировка трала осуществляется при
сравнительно небольших скоростях (2,5÷5,5 уз). В ряде случаев может оказаться
целесообразным вести траление при еще более низких скоростях. В связи с ростом
сопротивления воды и малой скоростью хода судна относительная поступь винта ![]() резко падает; это приводит к снижению КПД гребного
винта. В итоге возрастают мощность буксирования судна с заданной скоростью
резко падает; это приводит к снижению КПД гребного
винта. В итоге возрастают мощность буксирования судна с заданной скоростью ![]() и мощность, подводимая к гребному винту
и мощность, подводимая к гребному винту ![]() .
.
Винтовые характеристики при разных сопротивлениях движению судна приведены на рис. 2.6.
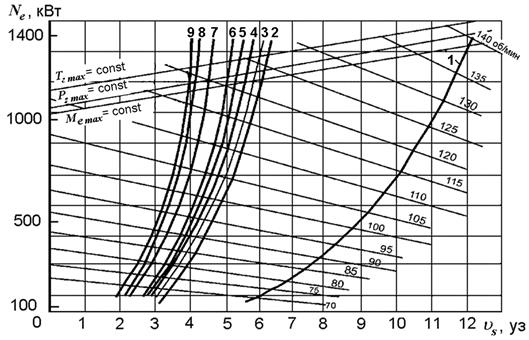
Рис. 2.6. Паспортная диаграмма пропульсивной установки БМРТ типа «Пушкин»: 1 – свободный ход, штиль, осадка 5,2 м; 2÷9 – ход с тралом на глубине (2 – 50 м, длина ваеров 300÷350 м, попутный ветер 3÷4 балла; 3 – 50 м, штиль; 4 – 50 м, ветер встречный 3÷4 балла; 5 – 300÷350 м, длина ваеров 950 м, попутный ветер 5 баллов; 6 – 300÷350 м, попутный ветер 3 балла; 7 – 300÷350 м, встречный ветер 3 балла; 8 – 300÷350 м, встречный ветер 5 баллов; 9 – 470 м, длина ваеров 1150 м, попутный ветер 2÷3 балла)
Степень загрузки двигателя на режиме траления может изменяться в довольно широких пределах; она определяется: мощностью лебедки, типом и размерами трала и распорных устройств, длиной вытравленных ваеров, глубиной моря, характером грунта, гидрометеорологическими условиями (наличие течений, ветра, волнения), скоростью траления, типом судна и установки.
Работа двигателя при буксировке воза характеризуется тем, что в этом случае необходимо преодолевать большее сопротивление движению, чем при свободном ходе судна. Кроме того, вследствие возрастания упора на гребные винты буксирующего судна при той же частоте вращения коленчатого вала КПД этих винтов уменьшается.
Суммарное буксировочное сопротивление движению судна ![]() , H (если буксируется, к примеру, одно
судно – баржа или воз), составит
, H (если буксируется, к примеру, одно
судно – баржа или воз), составит
![]() ,
,
где ![]() – сопротивление
буксирующего судна;
– сопротивление
буксирующего судна; ![]() – сопротивление буксируемого
судна;
– сопротивление буксируемого
судна; ![]() – сопротивление гребных винтов буксируемого
судна;
– сопротивление гребных винтов буксируемого
судна; ![]() – сопротивление буксирного троса.
– сопротивление буксирного троса.
Сумма ![]() определяет потребную силу
тяги на гаке
определяет потребную силу
тяги на гаке ![]() .
.
Эффективная мощность главного двигателя, кВт, необходимая
для обеспечения движения судна и буксируемого им воза с заданной скоростью ![]() , будет равна
, будет равна
 ,
,
где ![]() – пропульсивный КПД.
– пропульсивный КПД.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.