= T6 T5 T1P3+(T1(T5 +T6 )+ T6 T5)P2+(T1+T5+T6)P+1 ;
T6 T5 T1P3+(T1(T5 +T6 )+ T6 T5)P2+(T1+T5+T6)P+1+ Kраз (t6P+1)
1 .
WZE(P)= (-1) T1P+1(-1) = T6 T5 P2+ (T5+T6)P+1 =
1+ Wраз (T6 P+ 1)(T5 P+ 1)(T1 P+ 1) + Kраз (t6P+1)
= T6 T5 P2+ (T5+T6)P+1 ;
T6 T5 T1P3+(T1(T5 +T6 )+ T6 T5)P2+(T1+T5+T6)P+1+ Kраз (t6P+1)
eсmx= lim WXE(P) X =0.83;
eсmz= lim WZE(P) Z =0.83;
eлинx= lim WXE(P) 1 = ;
1.13. Определяем показатели качества переходных процессов, выполнив моделирование на ЭВМ по программе COMPAS. Для моделирования используется структурная схема, в которой все элементы представлены в виде типовых звеньев, содержащихся в программе COMPAS.
Переходные процессы получаем как реакцию системы на единичные ступенчатые задающие и возмущающие воздействия.
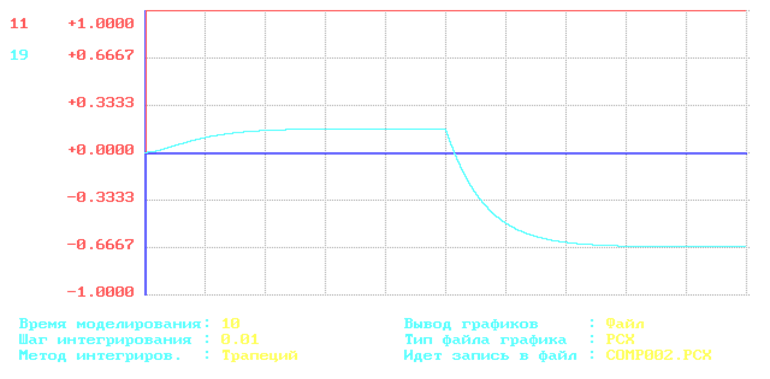
На рис.3 представлен график переходного процесса
при подаче постоянного сигнала по уравнению и возмущению, а на рис.4
представлен график переходного процесса при подаче сигнала постоянной скорости.
рис.3 График переходного процесса исходной системы при единичном ступенчатом воздействии (задающем и возмущающем)
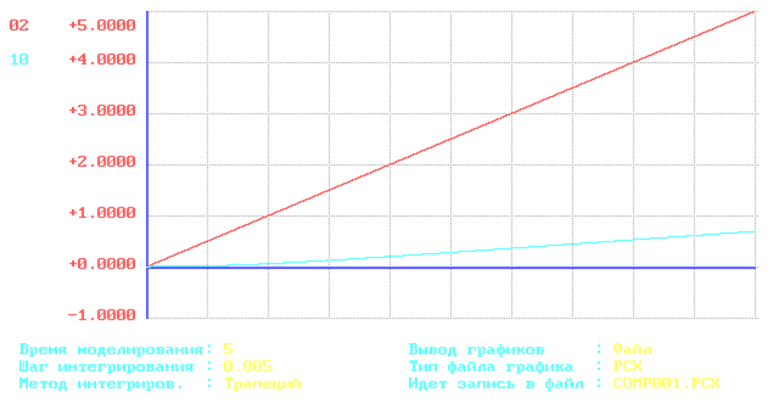 |
рис.4 График переходного процесса исходной системы при подаче сигнала постоянной скорости.
1.14. Анализируя исходную систему, заключаем, что:
1) время переходного процесса tпп= 2,3с.
2) пере регулирование отсутствует.
Статическая ошибка при подаче единичного ступенчатого сигнала по задающему воздействию равна- 0.83, что соответствует результатам вычисления. Статическая ошибка при подаче сигнала постоянной скорости по задающему воздействию- , что также численно совпадает с ошибкой, полученной аналитическим путем.
Часть 2. Синтез корректирующего звена.
2.1. Строим ЛАХ исходной системы.
W0 (P) = K0 (t6P+1) = K0 (0.3P+1) ;
(T6 P+ 1)(T5 P+ 1)(T1 P+ 1) (0.32P+1)(0.2P+1)(0.8P+1)
K0= 0.2;
При построении ЛАХ системы, состоящей из последователь- ных типовых звеньев учитывается, что логарифм произведения есть сумма логарифмов, поэтому для каждого звена можно построить ЛАХ, а затем просуммировать и получить ЛАХ всей системы. Для этого найдем частоты каждого из звеньев.
20lgK0= -13.98;
w1= 1 = 3; w2= 1 =3; w3= 1 = 5; w4= 1 = 1.25;
0.3 0.32 0.2 0.8
На оси ординат обозначим точку 20lgk0, а на оси абсцисс значения частот сопряжения.
Из точки 20lgk0 на оси ординат проводим прямую под углом 0[дБ/дек] (так как система не содержит в себе интегрирующее звено).
Далее проводим прямую под углом -20[дБ/дек] из точки lgw1 до сопряжения lgw4, а потом проводим излом асимптоты равным -40[дБ/дек].
2.2. Построение желаемой ЛАХ.
Желаемую ЛАХ строят по рекомендации. Так при построении
ЛАХ исходной системы у нас график пересек ось абсцисс. Так как длительность переходного процесса в скорректированной системе должна быть на порядок меньше, чем в исходной, то принимаем
wср =2p/tпп=13.65.
2.3. ЛАХ корректирующего звена.
ЛАХ корректирующего определяем как разность между
желаемой и исходной системы.
Получив ЛАХ корректирующего элемента, определяем по ней выражение передаточной функции и значение ее параметров:
WК = 100 (0.8P+1) (0.2P+1) ;
(0.3 P+ 1)(0.01 P+ 1)
2.4. Построим структурную схему скорректированной системы,
 |
2.5. Определим показатели качества переходных процессов скорректированной системы при единичном ступенчатом сигнале (рис.5) и при подаче сигнала постоянной скорости (рис.6).
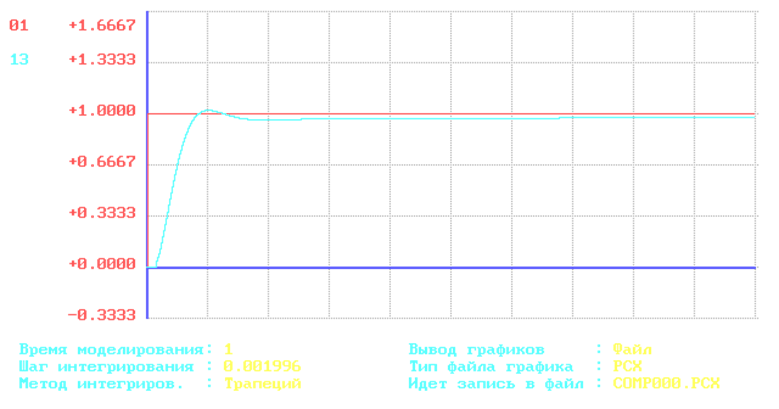 |
Рис.5. График переходного процесса скорректированной системы при ступенчатом единичном задающем воздействии.
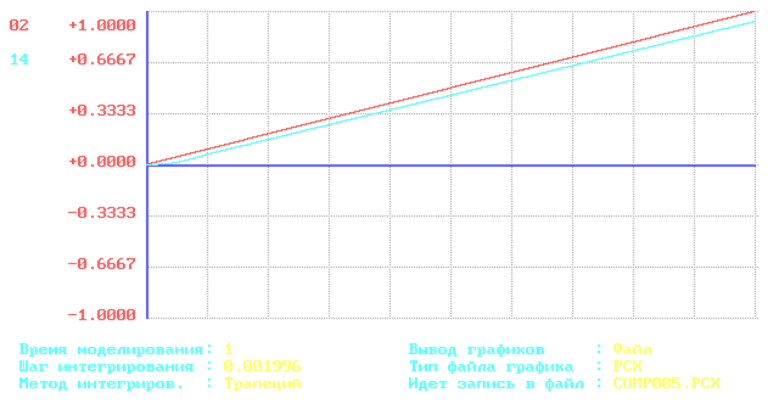 |
Рис.6. График переходного процесса скорректированной системы при подаче сигнала постоянной скорости.
2.6. Вычислим установившиеся (статические) ошибки по задающему и возмущающему воздействиям, приняв для задающего ступенчатую функцию и линейную функции, а для возмущающего – только ступенчатую функцию. Статические ошибки определяем в процентном отношении к модулю ступенчатого воздействия и скорости изменения линейного воздействия.
Передаточная функция скорректированной системы:
Wраз = 51 ;
(0.01P+1)(0.32P+1)
WXE(P)= 1 = (0.01P+1) (0.32P+1) ;
1+ Wраз (0.01P+1)(0.32P+1)+51
1 .
WZE(P)= (-1) T1P+1(-1) = (0.01P+1)(0.32P+1) ;
1+ Wраз ((0.8P+1)(0.32P+1)+52)(0.01P+1)
eсmx= lim WXE(P) X =0.02;
eсmz= lim WZE(P) Z =0.02;
eлинx= lim WXE(P) 1 = ;
P
Сравниваем показатели качества переходных процессов и
статические ошибки скорректированной системы в соответствии с заданными требованиями.
В процессе моделирования мы получили системы, удовлетворяющую следующим требованиям к качеству:
1. статическая ошибка при отработке единичного ступенчатого воздействия (задающего и возмущающего) не должна превышать 5% от заданного значения управляемой величины.
2. длительность переходного процесса обеспечена на порядок меньше, чем у исходной системы.
3. статическая ошибка при подаче сигнала постоянной скорости равна 4%.
Показатели качества и статические ошибки скорректированной системы удовлетворяют изложенным выше требованиям.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.