Федеральное агентство по образованию
Государственное
образовательное учреждение
высшего профессионального образования
“Сибирский государственный индустриальный университет”
Кафедра АЭП и ПЭ
Отчет по лабораторной работе №2
Цифровое моделирование двигателя переменного тока.
Вариант № 3.
Выполнил:
студент гр. АЭП-042
Веригин Н.В.
Проверил:
к.т.н., доцент
Богдановская Т.В.
Новокузнецк, 2007 г.
Цель работы: изучение методов построения цифровой модели двигателя переменного тока (асинхронного) при помощи среды моделирования MatLab Simulink, а так же изучение методов расчёта параметров двигателя по паспортным данным.
Задание на работу.
Номинальные параметры двигателя.
|
Тип |
Pn, кВт |
Масса, кг |
nn, об/мин |
h, % |
cosf |
IС |
Ik/In |
Mk/ Mn |
Mmax/ Mn |
J, кг*м3 |
|
RA71A4 |
1.9 |
10 |
2745 |
75 |
0.87 |
4.4 |
6.5 |
2 |
2,2 |
0.0008 |
Для построения переходного процесса создаем модель АД в системе Simulink.
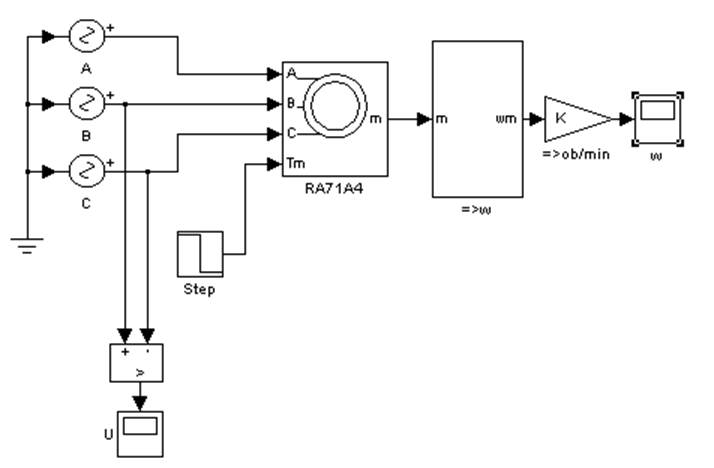
Рис. 1 Принципиальная схема модели АД.
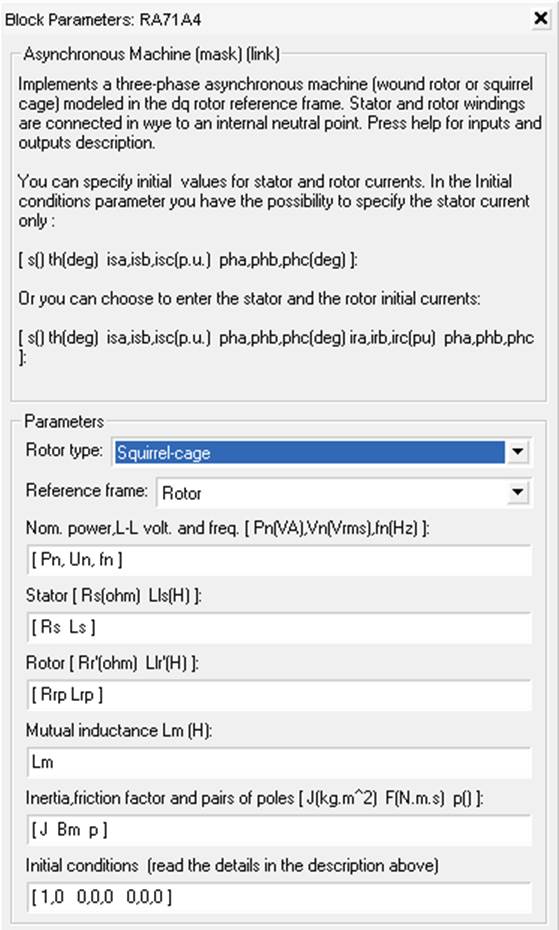
Рис. 2 Окно для задания параметров блока RA71A4.
Создаем М-файл, в котором помимо паспортных данных необходимо произвести расчет дополнительных параметров выбранного двигателя.
Текст М-файла:
Pn=1.9*10^3; Un=220; nn=2745; n=0.75; aI=6.5; aM=2.2; J=0.0018; n0=3000; p=2; fn=50; cosf=0.87; sinf=0.49
In=Pn/(3*Un*cosf*n)
sn=(n0-nn)/n0
w0=pi*n0/30
wn=nn*2*pi/60
Mn=Pn/wn
dPn=Pn*(1-n)/n
dPmex=0.15*dPn
dPdob2=0.05*dPn
M0=(dPmex+dPdob2)/w0
Mem=Mn+M0
dPper2=Mem*w0*sn
Kzag=0.5
dPper=dPn/(1+Kzag^2)
k=dPn-dPper
dPper1=dPper-dPper2
Rs=dPper1/(3*In^2)
Mem_max=aM*Mn+M0
b=3*Un^2/dPper2-2*Rs
Z=3*Un^2/(2*w0*Mem_max)-Rs
Rrp=0.5*sn*(b+sqrt(b^2-4*Z^2))
Xko=sqrt(Z^2+Rs^2)
sk=Rrp/Z
a=Rs/Rrp
Msn=2*Mem_max*(1+a*sk)/(sn/sk+sk/sn+2*a*sk)
dm=(Msn-Mem)/Mem
Xs=0.5*Xko
Xrp=Xs
I0=In*(sinf-(n*cosf/2/aM)+cosf-n)
dPct=k-(dPmex+dPdob2)
Rct=dPct/(3*I0^2)
Xm=Un/I0*sinf-Xs
Lm=Xm/(2*pi*fn)
Bm=dPmex/wn^2
K=-60/(2*pi);
Ls=Xs/(2*pi*fn)
Lrp=Xrp/(2*pi*fn*sn)
После запуска программы получаем дополнительные параметры выбранного двигателя и переходные процессы скорости.
Параметры двигателя:
sn = 0.0850
w0 = 314.1593 рад/с
wn = 287.4557 рад/с
Mn = 6.6097 Н*м
dPn = 633.3333 Вт
dPmex = 95 Вт
dPdob2 = 31.6667 Вт
M0 = 0.4032 Н*м
Mem = 7.0129 Н*м
dPper2 = 187.2694 Вт
Кzag = 0.5000
dPper = 506.6667 Вт
к = 126.6667
dPper1 = 319.3973 Вт
Rs = 5.4696 Ом
Mem_max = 14.9446 Н*м
b = 764.4145
Z = 9.9938 Ом
Rrp = 64.9641 Ом
Xko = 11.3926 Ом
sk = 6.5004
а = 0.0842
Msn = 0.5961 Н*м
dm = -0.9150
Xs = 5.6963 Ом
Хrp = 5.6963 Ом
I0 = 2.0370 А
dPct = 1.4211e-014
Rct = 1.1416e-015
Хm = 47.2244 Ом
Lm = 0.1503 Гн
Bm = 0.0011
Ls = 0.0181 Гн
Lrp = 0.2133 Гн
Получаем переходный процесс скорости при разгоне двигателя в холостую и при приложении нагрузки.
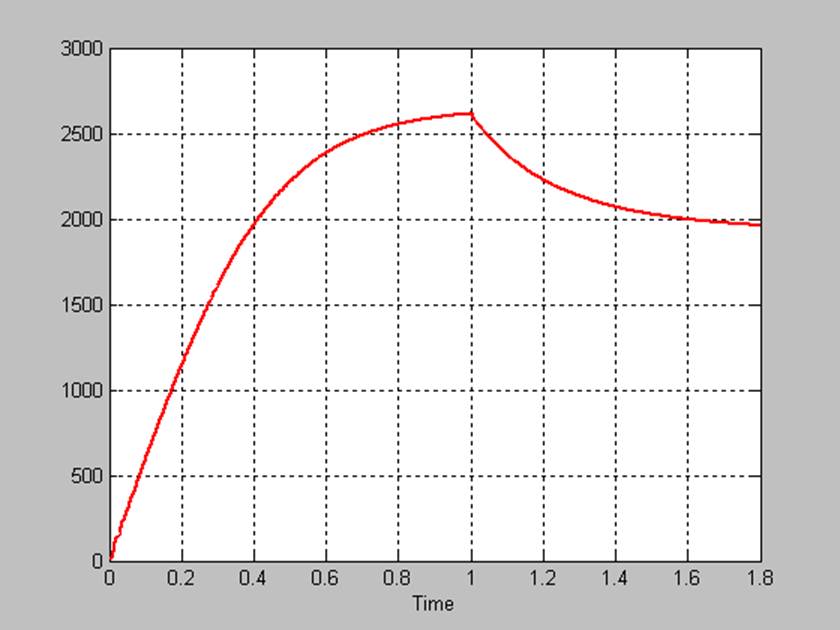
Рис. 3 Переходный процесс скорости.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

