

























Определим радиус приведения для поступательно-движущейся массы:
 (м)
(м)
Приведенный момент инерции поступательно-движущегося груза:
![]() ; ()
; ()
![]() (кг×м2)
(кг×м2)
Приведенный момент инерции пустого крюка:
![]() ; ()
; ()
![]() (кг×м2)
(кг×м2)
Зная радиус приведения, вычислим приведенное значение момента сопротивления:
![]() ; ()
; ()
![]() (Н×м)
(Н×м)
Момент потерь рассчитаем по формуле:
 ; ()
; ()
при подъёме груза:
 (Н×м)
(Н×м)
Приведенная жёсткость каната между грузом и барабаном/5, с. 8/;
 ; (7.17)
; (7.17)
здесь: m – кратность полиспаста; m=2;
СК- жесткость каната; СК=2×108 Н
h – высота подъёма; h=15 м
r - радиус приведения
 Н×м
Н×м
Момент инерции двигателя и звеньев, жестко связанных с двигателем, вращающимися со скоркстями отличными или равными скорости двигателя:
![]() ; ()
; ()
Момент инерции муфты типа МУВП 1-60:
![]() (кг×м2)
(кг×м2)
![]() (кг×м2)
(кг×м2)
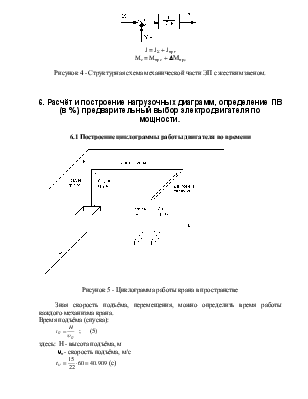
Для исследования свойства этой системы как объекта управления примем возмущающее воздействие Мпрс=0, D Мпрс=0 и преобразуем структуру к следующему виду:
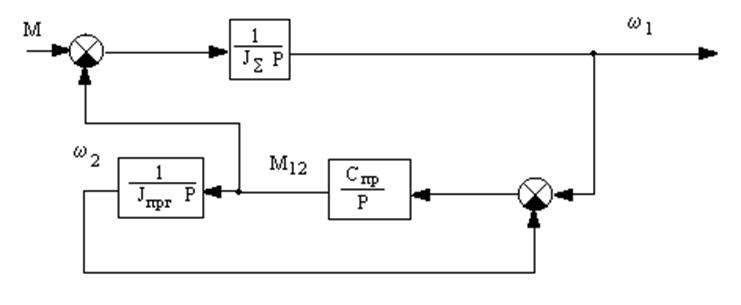
Рисунок 7 Преобразование структурной схемы механической части ЭП
Перенесем
воздействие М12 со входа звена с ПФ  на его
выход получим:
на его
выход получим:
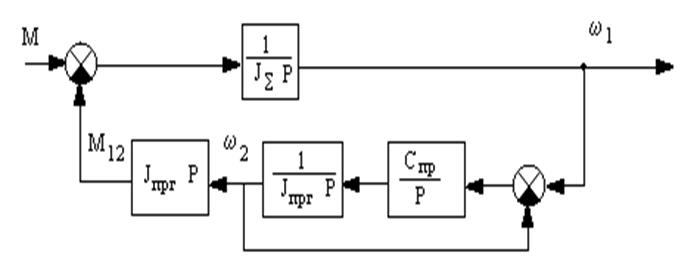
Рисунок 8. Продолжение структурных преобразований механической части
ЭП
Передаточная функция цепи ОС:
 ; ()
; ()
Искомая придаточная функция:
 - резонансная частота схемы
- резонансная частота схемы
 - резонансная частота массы при JΣ à¥
- резонансная частота массы при JΣ à¥
Передаточная функция примет вид:
 ; ()
; ()
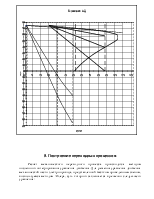
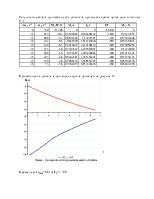
Для анализа свойств системы воспользуемся её логарифмическими частотными характеристиками ЛАХ и ЛФХ. Частоты спряжения асимптоты ЛАХ равны:
 ;
; ![]()
 ;
;  (1/с)
(1/с)
 1\с
1\с
ωсп1=37.905 с-1, ωсп2=40.433 с-1
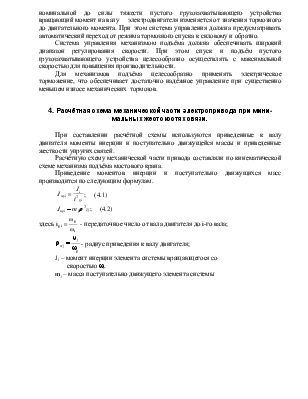
Для анализа свойств системы воспользуемся ее лагорифмическими частотными характеристиками ЛАХ и ЛФХ
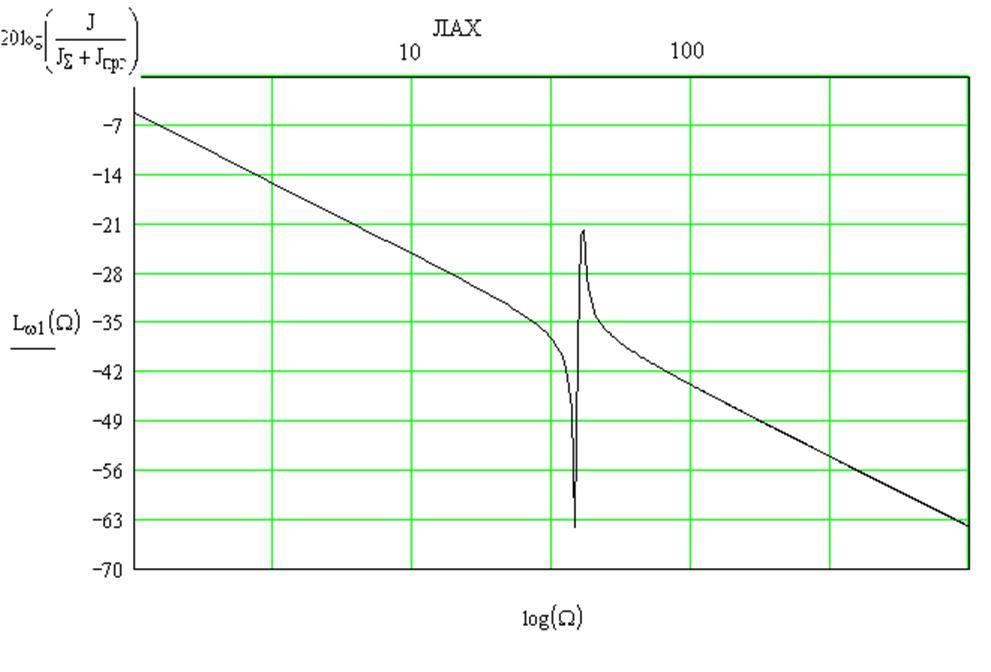
Рисунок 9.ЛАХ
В
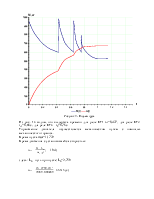
соответствии с передаточной функцией W1(p) система может быть представлена последовательным
соединением интегрирующего звена 2-го порядка с частотой сопряжения  и консервативного звена с резонансной
частотой
и консервативного звена с резонансной
частотой ![]() . При
. При ![]() ЛАЧХ
терпит разрыв, стремясь к - ¥; при
ЛАЧХ
терпит разрыв, стремясь к - ¥; при ![]() амплитуда
стремится к +¥, образуя второй разрыв.
амплитуда
стремится к +¥, образуя второй разрыв.
Низкочастотная амплитуда определяется интегрирующим звеном с коэффициентом обратно пропорциональным (Jпрг+ JS) и имеем наклон –20 об/дек.
Высоко
частотная асимптота (![]() ) соответствует также интегрирующему
звену, но при коэффициенте в g раз большем, чем в области
низких частот. В этом можно убедиться при W ॠв формуле Ww1(p),
при p= g W.
) соответствует также интегрирующему
звену, но при коэффициенте в g раз большем, чем в области
низких частот. В этом можно убедиться при W ॠв формуле Ww1(p),
при p= g W.
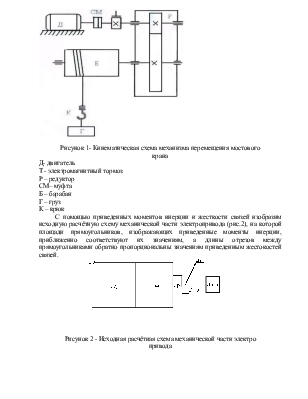
Так как частоты спряжения отличаются менее чем на 2 октавы, то значение частотных характеристик складываются алгебраически и влияние упругих связей на динамику электропривода можно пренебречь.
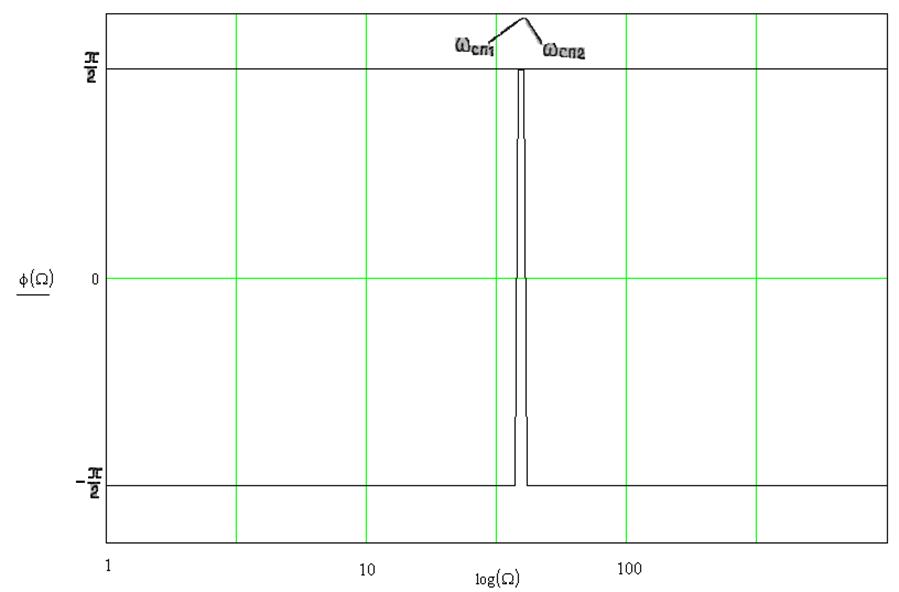
Рисунок 10.ЛФХ
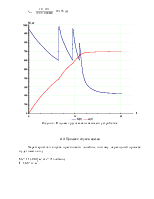
Поскольку ![]() ,то движение приведенной массы близко к
движению, определяемому интегрирующим звеном
,то движение приведенной массы близко к
движению, определяемому интегрирующим звеном  .
Кроме того в рассматриваемом случае
.
Кроме того в рассматриваемом случае ![]()
![]() , т.е. полюс передаточной функции
, т.е. полюс передаточной функции ![]() практически компенсируется ее нулем,
следовательно, область частот, где имеет место фазовый сдвиг
практически компенсируется ее нулем,
следовательно, область частот, где имеет место фазовый сдвиг  незначительна. Поэтому при отсутствии
обратных связей по координатам второй маховой массы
незначительна. Поэтому при отсутствии
обратных связей по координатам второй маховой массы ![]() для
синтеза систем управления ЭП можно без заметной погрешности представить механическую
часть привода жестким приведенным звеном.
для
синтеза систем управления ЭП можно без заметной погрешности представить механическую
часть привода жестким приведенным звеном.
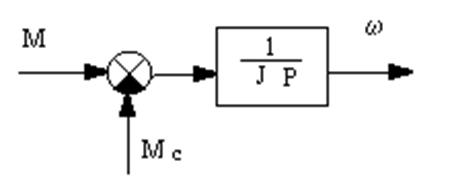
Рисунок 11. Структурная схема механической части электропривода с жёсткими связями
![]()
![]()
Построение естественной характеристики производится по формуле
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.