|
Задание для контрольной работы по теоретической механике (динамика Д3) |
|
|
|
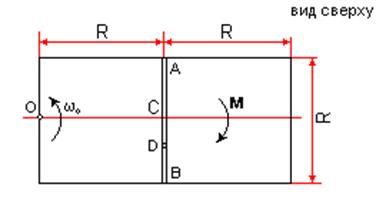
a. Однородная горизонтальная платформа (прямоугольная плита со сторонами 2R и R, R=0.5м) имеющая массу m1=16 кг, жестко скреплена с вертикальным валом и вращается вместе с ним вокруг оси z с угловой скоростью w0=2 с-1. В момент времени t0=0 на вал начинает действовать вращающий момент М=6t, направленный противоположно w0; одновременно груз D массой m2=10 кг, находящийся в желобе AB в точке С, начинает двигаться по желобу под действием внутренних сил по закону s=CD=0.4t2. Определить закон изменения угловой скорости платформы w=f(t). |
|
|
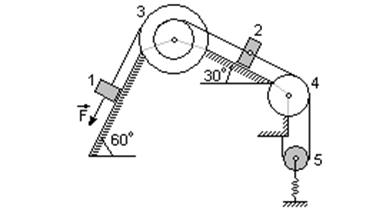
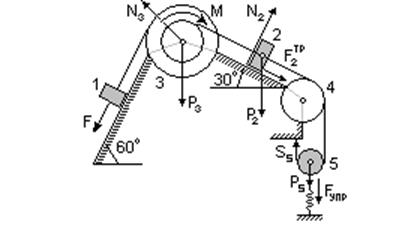
b. Механическая система состоит из грузов 1 и 2 (m1=0кг, m2=6кг), ступенчатого шкива 3 (m3=4кг) с радиусами ступеней R3=03.м и r3=0.1м и радиусом инерции относительно оси вращения r3=0.2м, блока 4 (m4=0) радиуса R4, подвижного блока 5 (m5=5кг). Тело 5 считать сплошным однородным цилиндром. Коэффициент трения грузов о плоскость f=0.1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3. К одному из тел прикреплена пружина с коэффициентом жесткости c=200 Н/м, ее начальная деформация равна нулю. Система приводится в движение из состояния покоя под действием силы F=80(4+5s) Н, зависящей от перемещения s точки ее приложения. На шкив 3 при движении действует постоянный момент М=1.2 Н*м сил сопротивления. Определить w3 в тот момент времени, когда s=0.2 м. |
Решение задачи a
Рассмотрим механическую систему, состоящую из платформы и груза D. Для определения w применим теорему об изменении кинетического момента системы относительтно оси z :
|
|
На систему действуют внешние силы Р1, Р2 (вес платформы и груза), реакции в оси и момент М. Все силы параллельны или пересекают ось z, поэтому в сумму моментов в правой части теоремы они не войдут, так как их моменты относительно оси z равны нулю. Тогда, считая положительным направление w0 против хода часовой стрелки, запишем теорему в виде: |
Разделяя переменные и интегрируя это уравнение, получим
![]() (*)
(*)
Для рассматриваемой механической системы
![]() (**)
(**)
где Lzпл и LzD – кинетические моменты платформы и груза относительно оси z соответственно
Так как платформа вращается вокруг оси z,
то ![]() . Значение
. Значение ![]() найдем
по теореме Гюйгенса:
найдем
по теореме Гюйгенса:
![]()
где ![]() - момент
инерции относительно оси z:’, параллельной оси z и проходящей через центр С платформы.
- момент
инерции относительно оси z:’, параллельной оси z и проходящей через центр С платформы.
Но, как известно, ![]() . Тогда
. Тогда ![]() и,
следовательно,
и,
следовательно,
![]() .
.
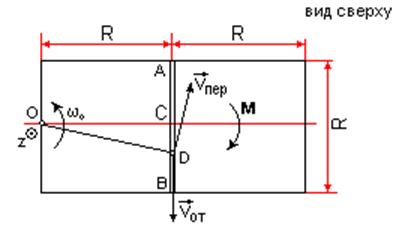
Для
определения ![]() обратимся к рисунку и рассмотрим движение
груза D как сложное, считая его движение по платформе
относительным, а вращение самой платформы вокруг оси z
переносным движением. Тогда абсолютна скорость груза
обратимся к рисунку и рассмотрим движение
груза D как сложное, считая его движение по платформе
относительным, а вращение самой платформы вокруг оси z
переносным движением. Тогда абсолютна скорость груза ![]() .
Так как груз D движется по закону s=CD=0.4t2, то
.
Так как груз D движется по закону s=CD=0.4t2, то ![]() . Изображаем вектор
. Изображаем вектор ![]() с
учетом знака ds/dt (при ds/dt<0 направление этого вектора
было бы противоположным). Затем, учитывая направление w, изображаем вектор
с
учетом знака ds/dt (при ds/dt<0 направление этого вектора
было бы противоположным). Затем, учитывая направление w, изображаем вектор ![]() , численно vпер=w OD. Тогда, по теореме Вариньона
, численно vпер=w OD. Тогда, по теореме Вариньона
![]() .
.
Но из рисунка видно, что OD2=R2+s2=R2+0.16t4. Подставляя эту величину в выражение для кинетического момента груза D, а затем значения кинетических моментов груза и платформы в равенство (**), получим с учетом данных задачи

Тогда уравнение (*) примет вид
![]() (***)
(***)
Постоянную интегрирования С1 определяем по начальным условиям: при t=0 w=w0. Получим С1=8.17w0=16.34. При этом значении С1 из уравнения (***) находим искомую зависимость w от t:
 , где t - в
секундах, w - в с-1.
, где t - в
секундах, w - в с-1.
Решение задачи b
Рассмотрим движение неизменяемой механической системы, состоящей из весомых тел 2,3,5 и невесомых тел 1,4, соединенных нитями.
|
|
1. Изобразим действующие на систему силы: активные F, Fупр, Р3, Р2, Р5, реакции N2, N3, натяжение нити S5, силу трения F2тр и момент М. Для определения угловой
скорости вращения шкива 3
2. Определяем кинетическую энергию системы Т0 и Т. Так как в начальный момент система находилась в покое, то Т0=0. |
Величина Т равна сумме энергий всех тел системы, имеющих массу:
Т=Т3+ Т2+ Т5
Учитывая, что тело 3 вращается вокруг неподвижной оси, тело 2 движется поступательно, а подвижный блок 5 – плоскопараллельно, получим:
 (*)
(*)
Все входящие сюда скорости нужно выразить через искомую w3. Для этого предварительно заметим, что v5 (скорость центра подвижного блока 5) и w5 (угловая скорость вращения блока 5) связаны соотношением w5r5=v5, где r5- радиус блока 5. Из кинематики также знаем, что v5=v2 / 2 и v2=w3r3. Кроме того, входящие в (*) моменты инерции имеют значения
Подставляя все выражения для скоростей и моментов инерции в (*) получим окончательно выражение для кинетической энергии системы

3. Теперь найдем сумму работ всех действующих внешних сил при перемещении, которое будет иметь система, когда точка приложения силы F пройдет путь s=0.2 м. Введя обозначения s2 – перемещение груза 2, s5 – перемещение центра подвижного блока 5, j3 – угол поворота шкива 3, l0 и l1 – начальное и конечное удлинение пружины, получим
 ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; 
Работы остальных сил равны нулю, так как сила Р3 и реакция N3 приложены к неподвижной оси шкива 3, реация N2 перпендикулярна перемещению груза 2, а сила натяжения нити S5 – приложена к мгновенному центру скоростей подвижного блока 5.
По условию задачи l0=0 (начальная деформация пружины равна нулю), тогда l1=s5 (удлинение пружины равно перемещению центра подвижного блока 5). Кроме того, перемещение s точки приложения силы F связано с углом поворота шкива 3 соотношением j3R3=s (то есть j3=s/R3). Величины s2 и s5 нужно также выразить через заданное перемещение s. При этом учтем, что зависимость между перемещениями здесь такая же, как и между соответствующими скоростями. Так как, например, v2=w3r3, то и s2=j3r3; v5=v2 / 2, то и s5=s2 / 2. Тогда для перемещений s2 и s5 будем иметь: s2=(r3/R3)s, s5=(r3/2R3)s. При найденных значениях j3, s2 и s5 для суммы вычисленных работ получим

Подставляя полученные выражения для работы и кинетической энергии системы в теорему об изменении кинетической энергии будем иметь:

и, подставляя в это равенство численные значения заданных величин, найдем искомую угловую скорость:
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.