Рис2.
Обозначение блоков структурной схемы:
АД–Асинхронный двигатель,
МК–микроконтроллер, предназначен для обработки информации и управления направлением вращения вала АД,
RS-485–интерфейс,
ПК – персональный компьютер.
2. Алгоритм функционирования
Описание алгоритм определения направления вращения вала АД:
1. На МК через интерфейс RS – 485 c ПК поступают импульсы.
2. МК определяет на какую ножку поступил импульс и выдает управляющий сигнал на электронный коммутатор.
3. импульс поступивший на коммутатор усиливается и передается на АД.
4. Передача информации по интерфейсу RS-485 со скоростью 4800 бот/с
Алгоритм изображён на (Рис3.)
Рис3.
3. Разработка принципиальной схемы устройства
3.1 Электродвигатель ДИД – 0.5У.
Двигатели серии ДИД имеют полный немагнитный ротор. Сдвиг фаз напряжения обмотки управления относительно напряжения обмотки возбуждения, равный 90о, осуществляется с помощью специальных схем независимо от нагрузки двигателя. Соединение с нагрузкой осуществляется с помощью трубки (ДИД – 0,1 , ДИД – 0,5 , ДИД – 0,6) либо муфты или шестерни. Не допускается непосредственное соединение вала с нагрузкой, создающей осевое усилие. Крепление двигателей – фланцевое. Режим работы – продолжительный (S1). Напряжение питания обмоток возбуждения и управления 36В, частота напряжения питания 400Гц. Основные характеристики двигателя приведены в таблице 3.1.
|
Р2 мах, Вт |
Мп, 10-3 Н*м |
no, об/мин |
IП, В, А |
IП, У, А |
Uтр, В |
τм, с |
КПД, % |
Jр,10-6 кг*м2 |
Zу, Ом |
Zв, Ом |
|
0,4 |
0,686 |
14000 |
0,09 |
0,15 |
0,4 |
0,11 |
8 |
0,0055 |
169+ j158 |
307+ j342 |
Таблица 3.1
3.2 Коммутирующая микросхема L293.
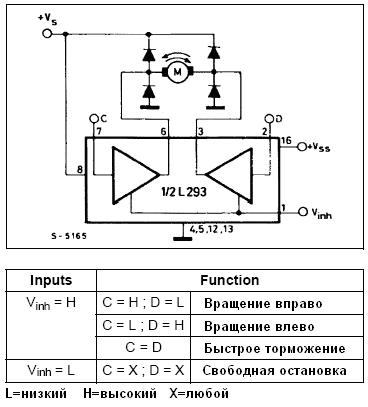
Рис. 3.2
На рисунке 3.2 изображена схема подключения АД к микросхеме L293. Такое подключение позволяет управлять вращением вала двигателя в двух направлениях. В таблице под схемой приводятся режимы работы АД при подаче импульсов разного уровня на управляющие ножки микросхемы.
3.3 Выбор микроконтроллера
Основным критерием выбора микроконтроллера является наличие двух таймеров – счетчиков, которые могут работать в режиме ШИМ, а так же возможность подключения интерфейса.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.