Кинематический анализ станка производится по структурным и кинематическим схемам. Анализ кинематических структур станков целесообразно производить по методике А.А. Федотенка . Структурная схема отражает реальные кинематические связи между элементами станка. Обозначения элементов структурных схем представлены на рис.1.1. Структурная схема представляет собой условное обозначение кинематических групп станка (или одной группы). Кинематическая группа включает внутреннюю и внешнюю кинематические связи. Внутренняя связь обеспечивает создание траектории исполнительного движения; внешняя связь идет от источника движения к внутренней связи. Источник движения (электродвигатель), внутренняя и внешняя связи и образуют кинематическую группу.
Кинематическая группа содержит звенья настройки движений по параметрам: траектория, путь, скорость, направление, исходное положение. Максимальное количество настраиваемых параметров движения зависит от вида движения (простое или сложное) и траектории движения (замкнутая или незамкнутая) и может быть определено по табл.1.1.
Звенья настройки во внутренней связи обозначаются iх, iy, iz, во внешней – iv, is.
Виды исполнительных движений в станках и их обозначения показаны на рис. 1.2. Исполнительные движения образуются элементарными движениями (вращательными В и поступательными П). Если исполнительное движение образуется одним элементарным движением, то оно называется простым, например, Фv (В1). Элементарные движения указываются с индексом; индексы внутри одной группы не должны повторяться. Если исполнительное движение образуется несколькими элементарными движениями, то оно называется сложным, например, Фv (B1П2) - сложное двухэлементарное (винтовое) движение.
Различают элементарные (Э), сложные (С) и комбинированные кинематические структуры станков. Первые состоят только из простых кинематических групп формообразования, вторые - только из сложных, третьи - из простых и сложных. Простые группы имеют внутреннюю связь в виде вращательной или поступательной кинематической пары; сложные - имеют во внутренней связи одну или несколько кинематических цепей. В обозначении структуры за буквой указывается число кинематических групп формообразования и затем - общее количество элементарных движений, создающих исполнительные движения формообразования (во всех группах). Примеры обозначения структур: Э11, Э33, С12, К23 и т.д.
Рекомендуется следующая методика структурного анализа станка.
Сначала изображается структурная схема станка. Ее можно исполнить, используя кинематическую схему, отбросив ненужные подробности и сохранив только связи, обеспечивающие движение формообразования, врезания и деления. Это не исключает, конечно, возможности изображения элементов других групп (например, группы вспомогательных движений) - при необходимости. Различают общую кинематическую структуру станка и частные структуры. Общая структура включает все кинематические группы формообразования; частная - обеспечивает выполнение на станке данного конкретного вида обработки.
На рис. 1.3. приведена общая кинематическая структура токарно-винторезного станка, обеспечивающая точение с продольной (реечная передача 1-2) и поперечной (винт 3) подачей, и нарезание резьбы (ходовой винт 4, кинематически связанный со шпинделем 5). На рис. 1.4 показана частная структура токарно-винторезного станка применительно к случаю нарезания резьбы; здесь сохранена только одна связь, необходимая для резьбонарезания,- между шпинделем 1 и ходовым винтом 2.
Структурный кинематический анализ производится в следующей последовательности. Из структуры выделяются кинематические группы формообразования, деления и врезания; анализируется каждая группа (внутренняя связь, внешняя связь, настройка движений по параметрам); затем могут анализироваться группы управления и вспомогательных движений.
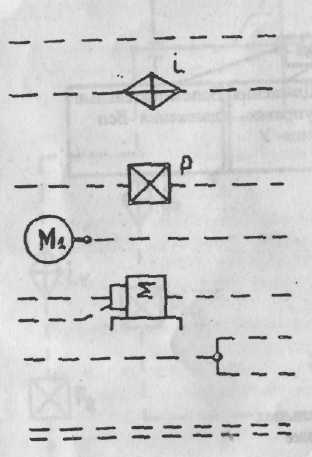
Кинематическая связь
Звено настройки (гитара сменных шестерен, коробка скоростей, коробка подач)
Реверсивный механизм
Электродвигатель
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.